




























2-6
Definition of specifications
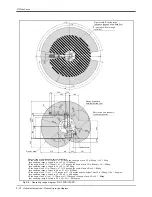
2 Robot arm
2.2.3 Relationships Among Mass Capacity, Speed, and Acceleration/Deceleration Speed
This robot automatically sets the optimum acceleration and deceleration speeds and maximum speed, according
to the load capacity and size that have been set, and operates using these automatically set speeds.
To achieve that, it is necessary to correctly set the actual load data (mass and size of hand and work) to be used.
However, vibration, overheating and errors such as excessive margin of error and overload may occur,depending
on the robot operation pattern or ambient temperature. In such a case, change the setting value to the +20%
range. If a setting is performed in such a way that it falls below the mounted load, the life span of the mechanism
elements used in the robot may be shortened. In the case of a work requiring a high degree of accuracy, set up the
load correctly and use the robot by lowering the ratios of the acceleration and deceleration speeds.
(1) Setting Load Capacity and Size (Hand Conditions)
Set up the capacity and size of the hand with the "HNDDAT*" parameter (optimum acceleration/deceleration
setting parameter), and set up the capacity and size of the work with the "WRKDAT*" parameter. Numbers 0 to 8
can be used for the asterisk (*) part. Designate the "HNDDAT*" and "WRKDAT*" parameters to be used using
the "LOADSET" command in a program.
For more details, refer to the separate "Instruction Manual/Detailed Explanation of Functions and Operations."
It is the same meaning as "LOADSET 0.0" if not using the "LOADSET".
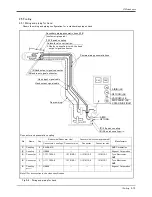
2.2.4 Vibrations at the Tip of the Arm during Low-Speed Operation of the Robot
Vibrations at the tip of the arm may increase substantially during the low-speed operation of the robot, depending
on the combination of robot operation, hand mass and hand inertia. This problem occurs when the vibration count
specific to the robot arm and the vibration count of the arm driving force are coming close to each other. These
vibrations at the tip of the arm can be reduced by taking the following measures:
1) Lower the robot's operating speed by approximately 5% from high speed using the OVRD instruction.
2) Change and move the teaching points of the robot.
3) Change the hand mass and hand inertia.







































































