























6-96
Safety
6Safety
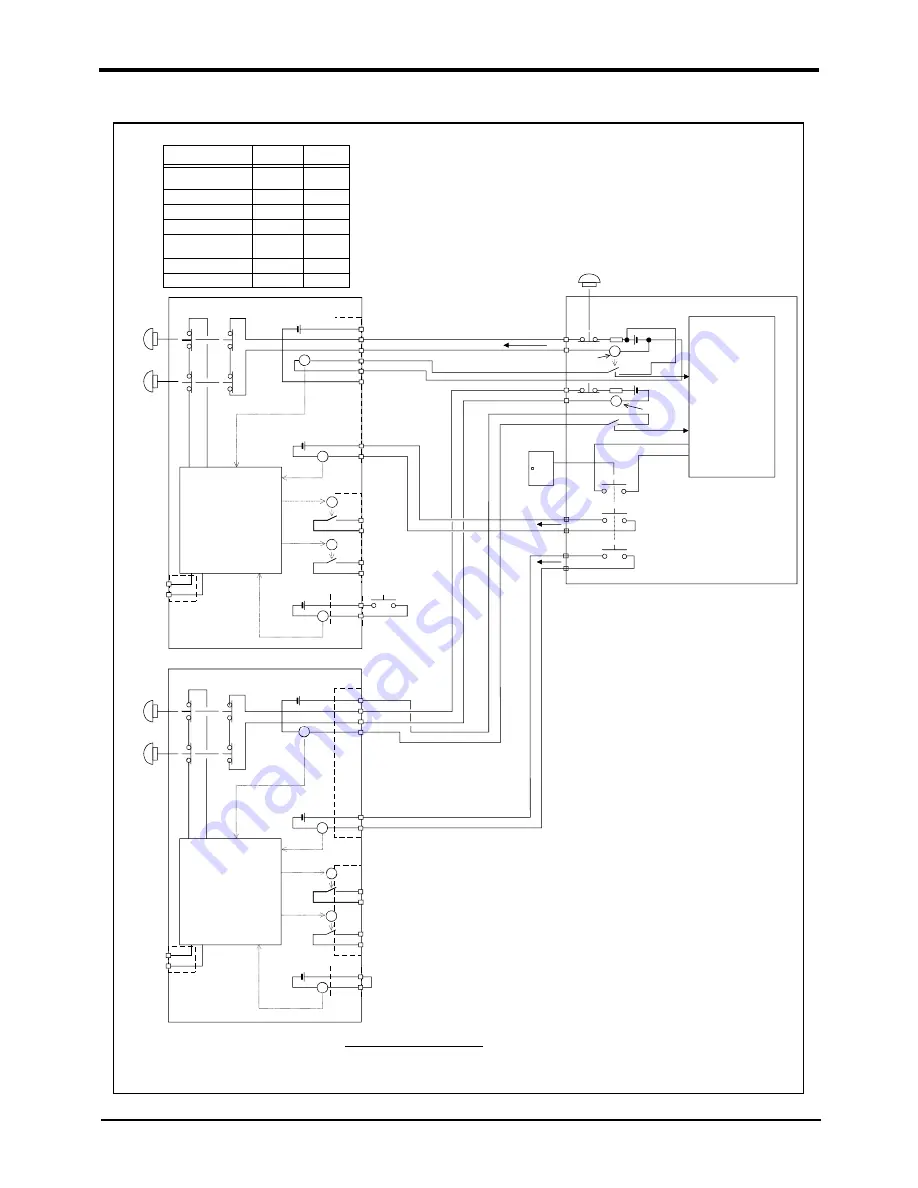
Fig.6-2 : Example of safety measures (
Case
2 )
1A/1B
2A/2B
3A/3B
4A/4B
5A/5B
6A/6B
8A/8B
9A/9B
1A/1B
2A/2B
3A/3B
4A/4B
10A/10B
11A/11B
5A/5B
6A/6B
EMGIN1/2
EMGIN1/2
EMGOUT1/2
EMGOUT1/2
Open
Open
}
}
1A/1B
2A/2B
3A/3B
4A/4B
5A/5B
6A/6B
8A/8B
9A/9B
1A/1B
2A/2B
3A/3B
4A/4B
10A/10B
11A/11B
5A/5B
6A/6B
EMGIN1/2
EMGIN1/2
EMGOUT1/2
EMGOUT1/2
}
}
FUSE
With the
compulsive guide
Monitor
FUSE
Monitor
RA
RA
RA
RA
RA
RA
RA
RA
RA
RA
RA
RA
OP emergency
stop button
TB emergency
stop button
Robot controller #1
Additional axis
contactor
control
output
Robot controller #2
OP emergency
stop button
TB emergency
stop button
Additional axis
contactor
control
output
Internal emergency stop circuit
Internal emergency stop circuit
Error output
→Include
S/W emergency stop
Mode output
Enebling device
Door switch input
External emergency
stop input
Door switch input
Error output
→Include S/W emergency stop
Mode output
Enebling device input
Short
Example of customer wiring (case 2)
Internal emergency
stop circuit
system emergency
stop output
Constitute by customer
Peripheral equipment
With the
compulsive guide
Door
Door switch
output
<Case 2 > : Two robot controller linkage. External power supply use. The door switch, enabling device connection
Emergency stop input
I/O
Connection
External emergency stop
input
I
○
Door switch input
I
○
Enable input
I
○
Error output
O
Additional axes
contactor control output
O
Mode output
O
External relay wiring
○
[Caution] Since we have omitted the information in part because of explanation, there is the section
different from the product.







































































