




























4. SAFETY OBSERVATION FUNCTION
4 - 29
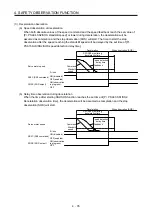
(b) Alarm occurrence
The STO function operates also during alarm occurrence. While STO is in operation, power to the
servo motor is shut off and the dynamic brake activates. For alarms which activate STO, refer to
chapter 7. For returning to normal operation, refer to section 4.5.10.
The timing chart is for STO/DB stop method.
50 r/min
0 r/min
Servo motor speed
STO status
Ordinary operation
STOS (STO output)
Base circuit (Energy
supply to the servo
motor)
ON (alarm)
OFF (no alarm)
ON
OFF
ON
OFF (shut-off)
ALM (Malfunction)
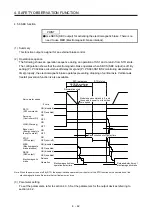
(c) STO shut-off during servo motor operation
Turn off STOC (STO command) only when the servo motor stops after servo off. [AL. 63 STO timing
error] occurs if STOC (STO command) is turned off during operation. Use the SS1 function when
decelerating at the same time.
50 r/min
0 r/min
Servo motor speed
STO status
Ordinary operation
STOC
(STO command)
STOS (STO output)
ON (disabled)
OFF (enabled)
Base circuit
(Energy supply to
the servo motor)
ON (alarm)
OFF (no alarm)
ON
OFF
ON
OFF (shut-off)
ALM (Malfunction)
(3) Parameter setting
To set the parameters, refer to section 4.3.3. Set the parameters referring to section 4.4.1 when using
the STO function with input devices, and section 4.4.3 when using the STO function in the safety
observation function control by network.
Additionally, when using STOS (STO output) with output devices, refer to 4.4.2 to set parameters.
Summary of Contents for MR-D30
Page 13: ...4 MEMO ...
Page 41: ...1 FUNCTIONS AND CONFIGURATION 1 28 MEMO ...
Page 141: ...6 DISPLAY 6 2 MEMO ...
Page 153: ...MEMO ...