

























-2-
4. Procedure from selection to automatic operation
Step
Description
Reference
1
Select the Force Sensor
Chapter 1 Force Sensor Specifications and
Configuration
1.3 Selecting the Force Sensor Set
2
Attach the force sensor attachment
adapter
Chapter 2 Installing the Force Sensor
2.1 Attaching the Sensor Attachment Adapter
3
Install the force sensor
Chapter 2 Installing the Force Sensor
4
Securing the force sensor cable
Chapter 2 Installing the Force Sensor
2.3 Fixing the force sensor cable
5
Install the tool (hand)
Chapter 2 Installing the Force Sensor
6
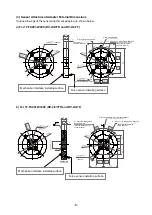
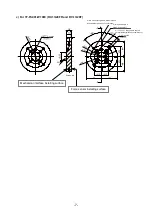
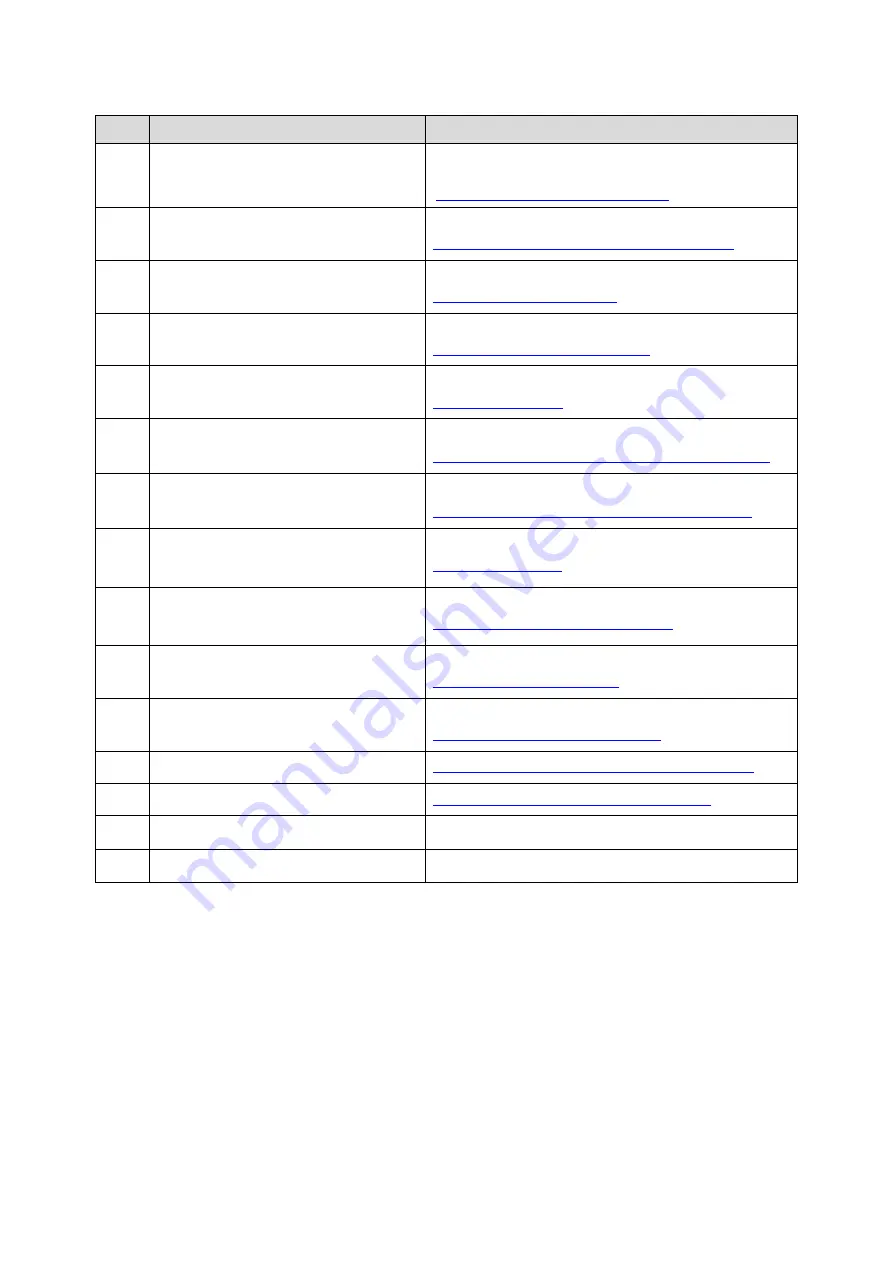
Connect the force sense interface unit
and robot controller
Chapter 3 Device Connection and Wiring
3.1 Force Sense Interface Unit
7
Connect the force sense interface unit
and force sensor
Chapter 3 Device Connection and Wiring
3.2 Force Sense Interface Unit
8
Turn ON the force sense interface unit
Turn ON the robot controller
Chapter 3 Device Connection and Wiring
9
Set the force sensor parameter
Restart the controller
Chapter 4 Parameter Setting
4.1 Force Sensor Parameter Setting
10
Set the tool (hand) information
Chapter 4 Parameter Setting
11
Check the force sensor connection and
setting
Chapter 4 Parameter Setting
4.3 Connection and Setting Check
12
Programming
Chapter 5 Force Sense Function (Programming)
13
Teaching
Chapter 7 Teaching Operation (Teaching)
14
Debug
15
Automatic operation
Summary of Contents for MELFA BFP-A3614
Page 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Page 2: ......
Page 34: ... 23 2 F series a CR750 D controller ...
Page 35: ... 24 b CR751 D controller ...
Page 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Page 75: ... 64 MEMO Please use this page for your memo ...
Page 95: ... 84 MEMO Please use this page for your memo ...
Page 103: ... 92 MEMO Please use this page for your memo ...
Page 111: ... 100 MEMO Please use this page for your memo ...
Page 119: ... 108 MEMO Please use this page for your memo ...
Page 123: ... 112 MEMO Please use this page for your memo ...
Page 129: ... 118 MEMO Please use this page for your memo ...
Page 133: ... 122 MEMO Please use this page for your memo ...
Page 137: ... 126 MEMO Please use this page for your memo ...
Page 143: ... 132 MEMO Please use this page for your memo ...
Page 149: ... 138 MEMO Please use this page for your memo ...
Page 153: ... 142 MEMO Please use this page for your memo ...
Page 159: ... 148 MEMO Please use this page for your memo ...
Page 171: ... 160 MEMO Please use this page for your memo ...
Page 183: ... 172 MEMO Please use this page for your memo ...
Page 191: ... 180 MEMO Please use this page for your memo ...
Page 211: ......































































