





























-184-
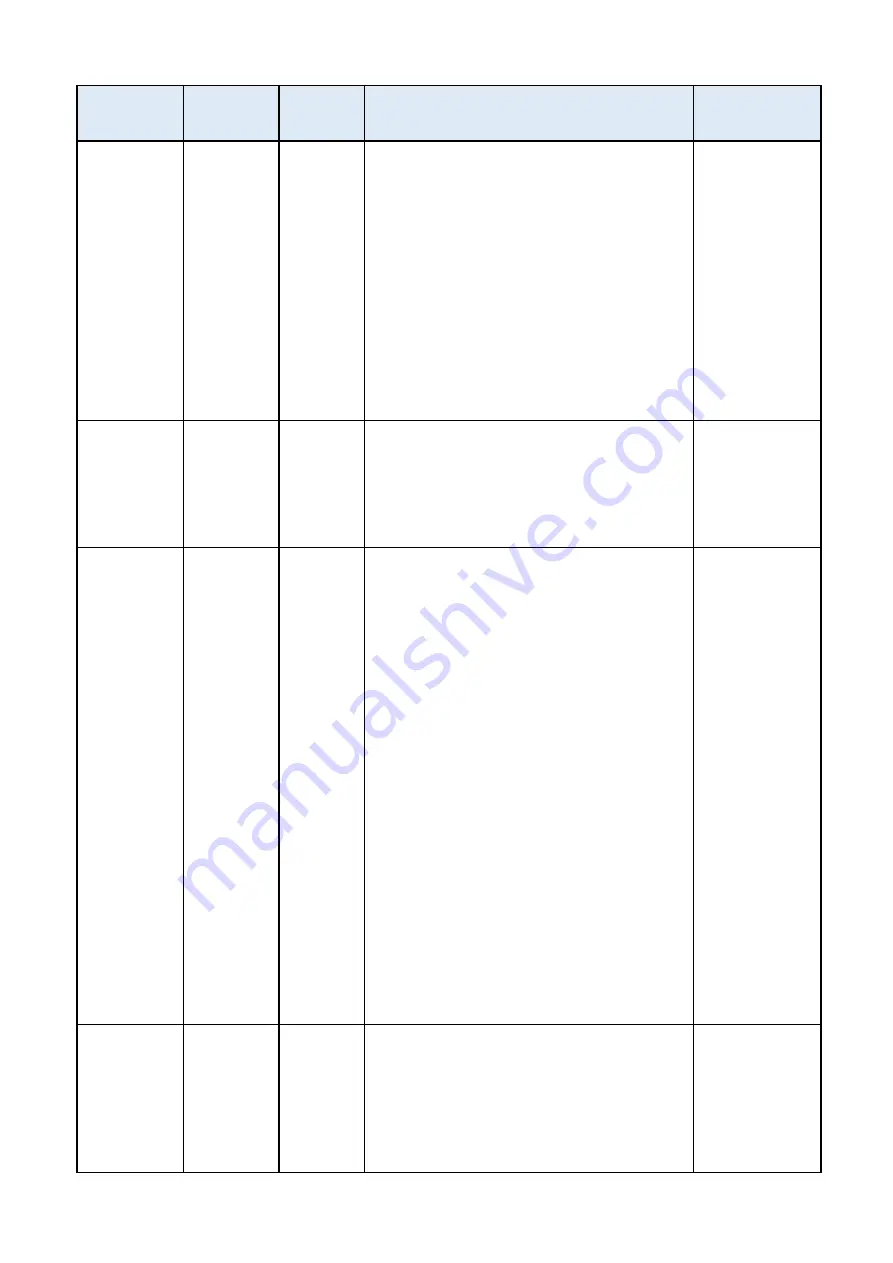
Parameter
Parameter
Name
No. of
Elements
Description
Factory Default
Setting
Center of
gravity
position of
hand tip
FSGRP01-
09
6 real
numbers
Sets the load center of gravity position used for
gravity offset cancel.
1st element: Load center of gravity position X [mm]
2nd element: Load center of gravity position Y [mm]
3rd element: Load center of gravity position Z [mm]
4th element: Rotation angle of load center of
gravity A [deg]
5th element: Rotation angle of load center of
gravity B [deg]
6th element: Rotation angle of load center of
gravity C [deg]
(These values because these are set
automatically by the force calibration function,
so you do not need to be set again.)
0.0, 0.0, 0.0,
0.0, 0.0, 0.0
Hand tip
weight
FSMASS01
-09
1 real
number
Sets the load mass used for gravity offset
cancel.
[Setting unit]: kg
(These values because these are set
automatically by the force calibration function,
so you do not need to be set again.)
0.0
Force
command
value
Limit value
FSFCMD01
-09
8 real
numbers
The value has different roles in the force
control and the limited stiffness control.
[In the case of force control]
Sets the force command for force sense
control (force control).
[Setting range]: - force sensor tolerance value
to + force sensor tolerance value
[Setting unit]: X, Y, Z component = N
A, B, C component = N·m
(This setting is not required for axes for which
force control is not selected.)
[In the case of the stiffness control with limit]
Sets the limit value for the limited stiffness
control.
[Setting range]: 0 to + force sensor tolerance
value
[Setting unit]: X, Y, Z, L1 component = N
(L1 component sets the limit value for the
resultant force.)
A, B, C, L2 component = N·m
(L2 component sets the limit value for the
resultant moment.)
(The value is not required in the axis that is not
applying the limited stiffness control.)
0.0, 0.0, 0.0,
0.0, 0.0, 0.0,
0.0, 0.0
Speed
command
value
FSSPD01-
09
8 real
numbers
Sets the speed command value for force
sense control (force control).
[Setting range]: 0.0 - 50.0
[Setting unit]: X, Y, Z component = mm/s
A, B, C component = deg/s
(This setting is not required for axes for which
force control is not selected.)
0.0, 0.0, 0.0,
0.0, 0.0, 0.0,
0.0, 0.0
Summary of Contents for MELFA BFP-A3614
Page 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Page 2: ......
Page 34: ... 23 2 F series a CR750 D controller ...
Page 35: ... 24 b CR751 D controller ...
Page 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Page 75: ... 64 MEMO Please use this page for your memo ...
Page 95: ... 84 MEMO Please use this page for your memo ...
Page 103: ... 92 MEMO Please use this page for your memo ...
Page 111: ... 100 MEMO Please use this page for your memo ...
Page 119: ... 108 MEMO Please use this page for your memo ...
Page 123: ... 112 MEMO Please use this page for your memo ...
Page 129: ... 118 MEMO Please use this page for your memo ...
Page 133: ... 122 MEMO Please use this page for your memo ...
Page 137: ... 126 MEMO Please use this page for your memo ...
Page 143: ... 132 MEMO Please use this page for your memo ...
Page 149: ... 138 MEMO Please use this page for your memo ...
Page 153: ... 142 MEMO Please use this page for your memo ...
Page 159: ... 148 MEMO Please use this page for your memo ...
Page 171: ... 160 MEMO Please use this page for your memo ...
Page 183: ... 172 MEMO Please use this page for your memo ...
Page 191: ... 180 MEMO Please use this page for your memo ...
Page 211: ......





































































