





























-181-
Appendix 7 Parameter
Appendix 7.1 Setting Parameters and Status Variables for Force Sense Control
Conditions
Parameter
Parameter
Name
No. of
Elements
Description
Factory Default
Setting
Set axis No.
AXJNO
16
integers
Sets the force sense interface unit or
additional axis number for the element
corresponding to the servo control axis
number being used.
<If using force sense interface unit>
Servo control axis No.: Set "9" for axis No.1.
0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0,
0, 0, 0, 0
Mechanical
No.
designation
AXMENO
16
integers
Enter a mechanical number corresponding to
the servo control axis number being used.
Always set "0" for axes that are not being
used.
<If using force sense interface unit>
Servo control axis No.: Set "1" for axis No.1.
0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0,
0, 0, 0, 0
Force sensor
coordinate
system
selection
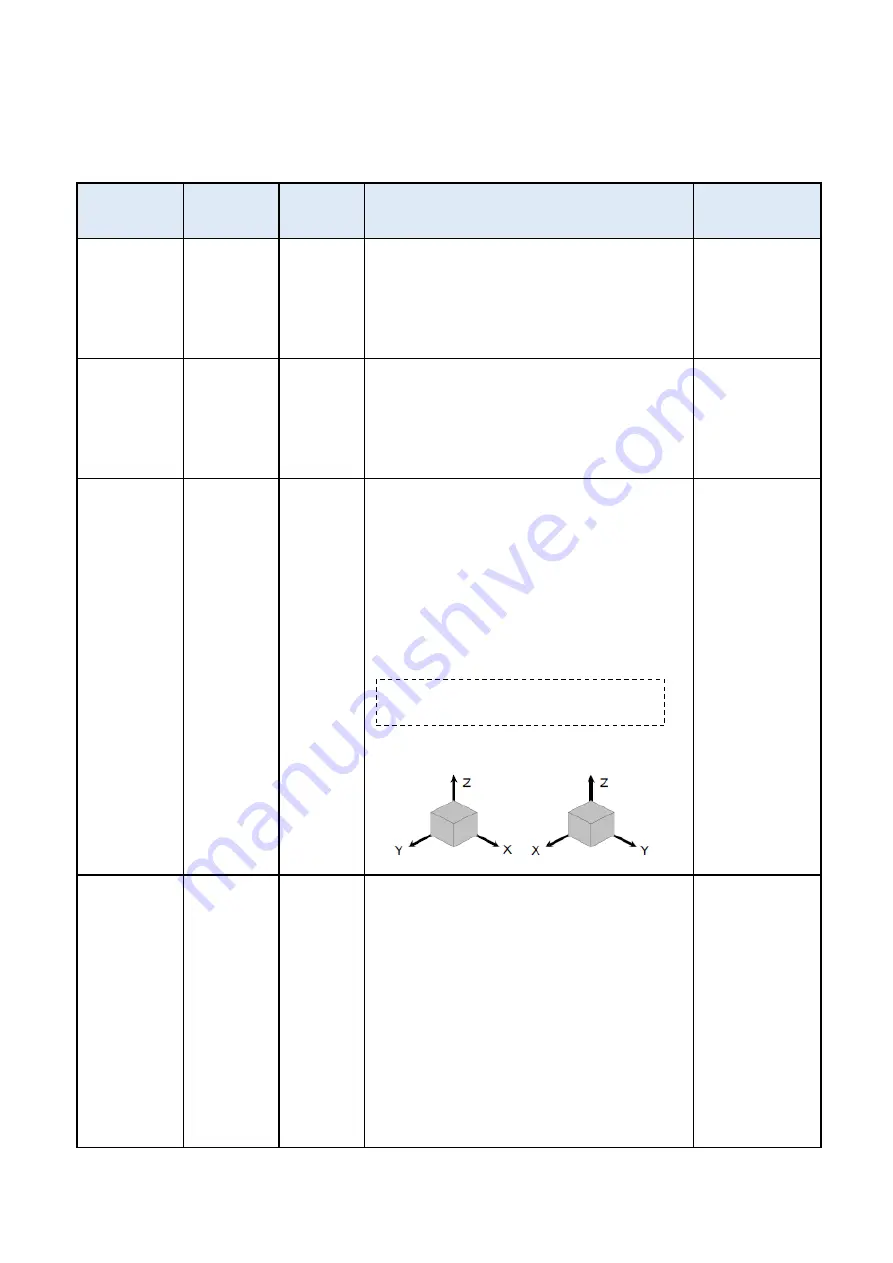
FSHAND
1 integer
Selects the force sensor coordinate system
hand system (left-hand system/right-hand
system).
The force sensor coordinate system hand
system differs depending on the sensor
attachment direction, and therefore it is
necessary to change the setting based on the
attachment direction.
Set the left-hand system for recommended
attachment.
0
Force sensor
attachment
position
FSXTL
6 real
numbers
Sets the positional relationship for the
mechanical interface coordinate system and
force sensor coordinate system.
1st element: X-axis direction coordinate system
origin offset [mm]
2nd element: Y-axis direction coordinate system
origin offset [mm]
3rd element: Z-axis direction coordinate system
origin offset [mm]
4th element: Coordinate axis rotation angle around
X-axis [deg]
5th element: Coordinate axis rotation angle around
Y-axis [deg]
6th element: Coordinate axis rotation angle around
Z-axis [deg]
0.0, 0.0, 0.0,
0.0, 180.0, 0.0
(vertical
multi-joint
robots)
0.0, 0.0, 0.0,
0.0, 0.0, 180.0
(horizontal
multi-joint
robots)
0: Force sensor coordinate system left-hand system
1: Force sensor coordinate system right-hand system
<Left-hand system> <Right-hand system>
Summary of Contents for MELFA BFP-A3614
Page 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Page 2: ......
Page 34: ... 23 2 F series a CR750 D controller ...
Page 35: ... 24 b CR751 D controller ...
Page 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Page 75: ... 64 MEMO Please use this page for your memo ...
Page 95: ... 84 MEMO Please use this page for your memo ...
Page 103: ... 92 MEMO Please use this page for your memo ...
Page 111: ... 100 MEMO Please use this page for your memo ...
Page 119: ... 108 MEMO Please use this page for your memo ...
Page 123: ... 112 MEMO Please use this page for your memo ...
Page 129: ... 118 MEMO Please use this page for your memo ...
Page 133: ... 122 MEMO Please use this page for your memo ...
Page 137: ... 126 MEMO Please use this page for your memo ...
Page 143: ... 132 MEMO Please use this page for your memo ...
Page 149: ... 138 MEMO Please use this page for your memo ...
Page 153: ... 142 MEMO Please use this page for your memo ...
Page 159: ... 148 MEMO Please use this page for your memo ...
Page 171: ... 160 MEMO Please use this page for your memo ...
Page 183: ... 172 MEMO Please use this page for your memo ...
Page 191: ... 180 MEMO Please use this page for your memo ...
Page 211: ......







































































