





























-123-
Chapter10 Exercise
Exercise 1: Phase focusing and assembly inspection
Exercise 1-1 Hand insertion and withdraw operation
1) Set "185.00" only for the Z-axis of the robot tool data.
Teach the position above the cylinder where the gear is to P2.
(When the hand cannot be inserted to the cylinder, teach the position again.)
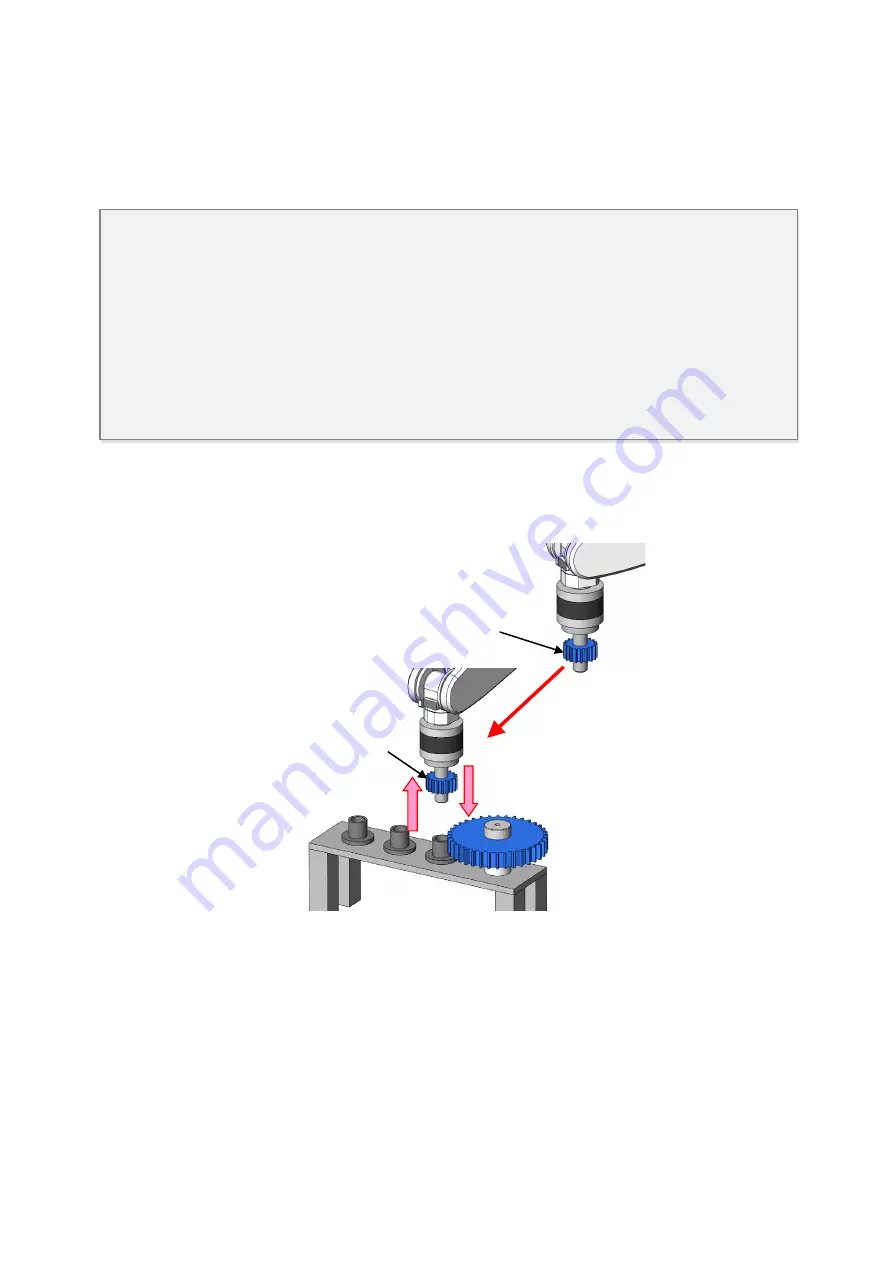
2) Move the robot to P2, and insert the hand to the cylinder with the force sense function.
Record the height of Z-axis at the point when completely inserted to a variable.
(If the robot hand hits the gear of fixture at insertion, rotate it manually so that it is inserted.)
3) Lift the robot in Z-axis direction and pull out the hand.
P2
PHome
Summary of Contents for MELFA BFP-A3614
Page 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Page 2: ......
Page 34: ... 23 2 F series a CR750 D controller ...
Page 35: ... 24 b CR751 D controller ...
Page 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Page 75: ... 64 MEMO Please use this page for your memo ...
Page 95: ... 84 MEMO Please use this page for your memo ...
Page 103: ... 92 MEMO Please use this page for your memo ...
Page 111: ... 100 MEMO Please use this page for your memo ...
Page 119: ... 108 MEMO Please use this page for your memo ...
Page 123: ... 112 MEMO Please use this page for your memo ...
Page 129: ... 118 MEMO Please use this page for your memo ...
Page 133: ... 122 MEMO Please use this page for your memo ...
Page 137: ... 126 MEMO Please use this page for your memo ...
Page 143: ... 132 MEMO Please use this page for your memo ...
Page 149: ... 138 MEMO Please use this page for your memo ...
Page 153: ... 142 MEMO Please use this page for your memo ...
Page 159: ... 148 MEMO Please use this page for your memo ...
Page 171: ... 160 MEMO Please use this page for your memo ...
Page 183: ... 172 MEMO Please use this page for your memo ...
Page 191: ... 180 MEMO Please use this page for your memo ...
Page 211: ......







































































