


























13
Service Manual
www.microphase.eu
Dc
DRIVE
CNC
DRIVE
CNC
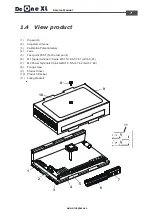
With a voltage (example from a CNC output) you can command the drive in torque mode.
Applying a signal of +/-10V at TPRC, the Drive to supply positive or negative peak current.
The formula to determine the value of Voltage to apply in TPRC in order to obtain requested current
is the following:
Example: (Drive size 10/20A, request current 8A)
NOTE:
In current reference the loop of internal velocity automatically excludes itself .
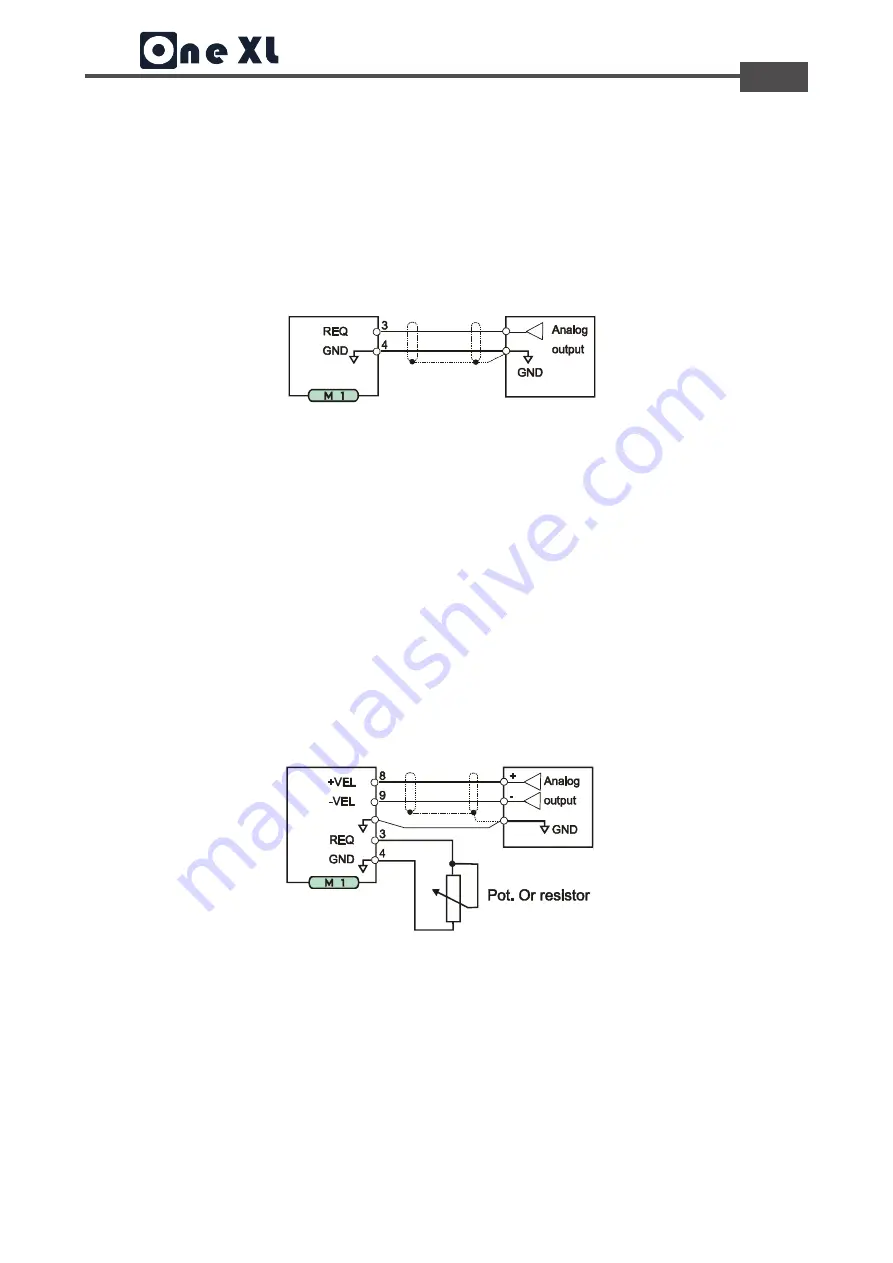
Current output limitation
With an external potentiometer connected from GND and TPRC input, you have a limitation of output
current (from zero to max. size) drive's.
External potentiometer (470K-1M
Ohm) 3-10 TURNS
The speed loop remains active and uses the input reference /-VEL.
Connect between terminal and GND terminal REQ a resistor 1/4W or 1/8W. (The figure is used a
potentiometer). With external resistance tends to zero ohms, the output current tends to zero. Increasing
the ohmic value of resistance, the value of current supplied increases. With 47K of the current is
limited to 50% on the Maximum size. The loop motor speed remains active.
2.3
Current request (REQ)
V(TPRC) = 10 * Request current / PKcurrent Drive
V(TPRC) = 10 * 8 / 20 = 4V
(Signal terminal pin 3)







































































