
























11
Service Manual
www.microphase.eu
Dc
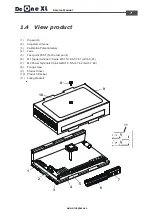
Signal inputs and outputs
M1 CONNECTOR
1 CURR
Current motor monitor
(OUT): +/-4Vdc=Rated current, +/-8Vdc=Peak current
output in Volts. This output may be used to monitor the torque the motor is
producing (Standard setting)
2 FAULT (OUT)
Fault drive, open collector output max. 50mA
Normally closed, opens when the drive in protection mode
3 REQ
REQ:
, can be used in 2 distinct modes:
1) Motor Current limit mode (by REQ setting):
A motor current limit mode connect an external resistor to GND reduces
the maximun current. Connect a 1/4W o 1/8W resistor between the
TPRC (pin 3) and GND (pin 4) terminals. A 47Kohm external resistor
reduces the current by 50%. (Note: The drive velocity loop remains
active)
2) Torque request (by REQ setting):
Range: +/- 10V, which corresponds to the drives peak current output. In
this mode the velocity loop is automatically disabled.
4 GND
Signal Common Ground
Corrisponds to power supply's negative GND input
5 +9.8V (OUT)
Power 9.8Vdc max 4mA
6 –9.8V (OUT)
Power supply –9.8Vdc max 4mA
7 START (IN)
Positive drive enable with range >+9Vdc min. to +30Vdc max
8 +VEL (IN)
Reference Positive differential input (Velocity command)
9 -VEL (IN)
Reference Negative differential input (Velocity command)
10 ENC A (IN)
or
–DT (IN)
Encoder input Channel A (High logic level from >2,8V to +24Vdc max. Low
logic level <1,5V).
Is possible setting this terminal for
–DT tachogenerator input
11 ENC B (IN)
Encoder input Channel B (High logic level from >2,8V to +24Vdc max. Low
logic level <1,5V)
12 +5V (OUT)
Power 5V max. 130mA
13 GND
Signal Common Ground. Corrisponds to power supply's negative GND input.
14 +LSW
Positive Limit Switch input. See page 34
15 N.A
Don’t use this terminal
16 -LSW
Negative Limit Switch input. See page 34







































































