



























7. Commissioning
• DOK-CONTRL-DDC+MDD+DLC-ANW1-EN-E1,44 • 01.97
70
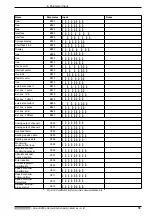
Smoothing time
constant
The smoothing time constant can be used
• to suppress the quantization effects in the detection of the actual speed
value and
• to filter the resonance frequency caused, e.g., by coupling.
The smallest input value is 250
µ
s. This means that the smoothing time con-
stant is switched off.
Current regulator
Do not change the standard current regulator parameter.
Caution
7.8.
Check Drive Load
To check drive load and the mechanical system of the machine, measure
motor current at feed velocity, in rapid traverse and during acceleration.
The motor current can be measured at analog output channel AK2 (X3-3/4).
In parameter C 001, 0000 0000 must be programmed. Load torque can be
calculated using the motor current.
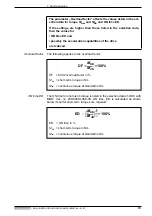
Load torque at feed
velocity
Do not exceed 60% of the continuous torque of the motor during standstill
and at maximum feed velocity.
Causes of excessive load torque:
• axis clamp has not been released
• insufficient lubricant
• blocking brake not released - check connection
• weight counterbalance not sufficient
• recirculating ball screw sluggish
• too much tension in slideways
Load torque in rapid
traverse
Do not exceed 75 % of the continuous torque of the motor when in rapid tra-
verse.
Source of danger:
Damage to drive controller as a result of incorrect
set current regulator (parameter C009).
Possible consequences:
The drive controller can be thermally damaged.
How to avoid:
Do not change the standard parameter set by
INDRAMAT.
M
L
U
AK2
10V
-------------
I
typ
K
m
•
•
=
M
L
= load torque in Nm
U
AK2
= voltage at analog output channel 2 in V
I
typ
= rated current in A of machine
K
m
= torque constant in Nm/A







































































