





























26
ELD2-RS70** User Manual
4.2.2
【
Class 1
】
Gain Adjust
value
10-500
Ω
50
P
S
T
Set regenerated discharge resistance value
Pr0.17
Regenerative discharge resistance
power
Range
unit
default
Related
control mode
10-500
0
W
50
P
S
T
Set regenerative discharge resistance power
Pr1.00
1st gain of position loop
Range
unit
default
Related
control mode
0 -30000 0.1/s
320
P
You can determine the response of the positional control system. Higher the gain of position loop you
set, faster the positioning time you can obtain. Note that too high setup may cause oscillation.
Pr1.01
1st gain of velocity loop
Range
unit
default
Related
control mode
0 -32767 0.1Hz
180
P
S
T
You can determine the response of the velocity loop. In order to increase the response of overall
servo system by setting high position loop gain, you need higher setup of this velocity loop gain as
well. However, too high setup may cause oscillation.
Pr1.02
1st Time Constant of Velocity Loop
Integration
Range
unit
default
Related
control mode
0 -10000 0.1ms
310
P
S T
You can set up the integration time constant of velocity loop, Smaller the set up, faster you can
dog-in deviation at stall to 0.The integration will be maintained by setting to”9999”.The integration
effect will be lost by setting to”10000”.
Pr1.03
1st Filter of Velocity Detection
Range
unit default
Related
control mode
0 -31
-
15
P
S T
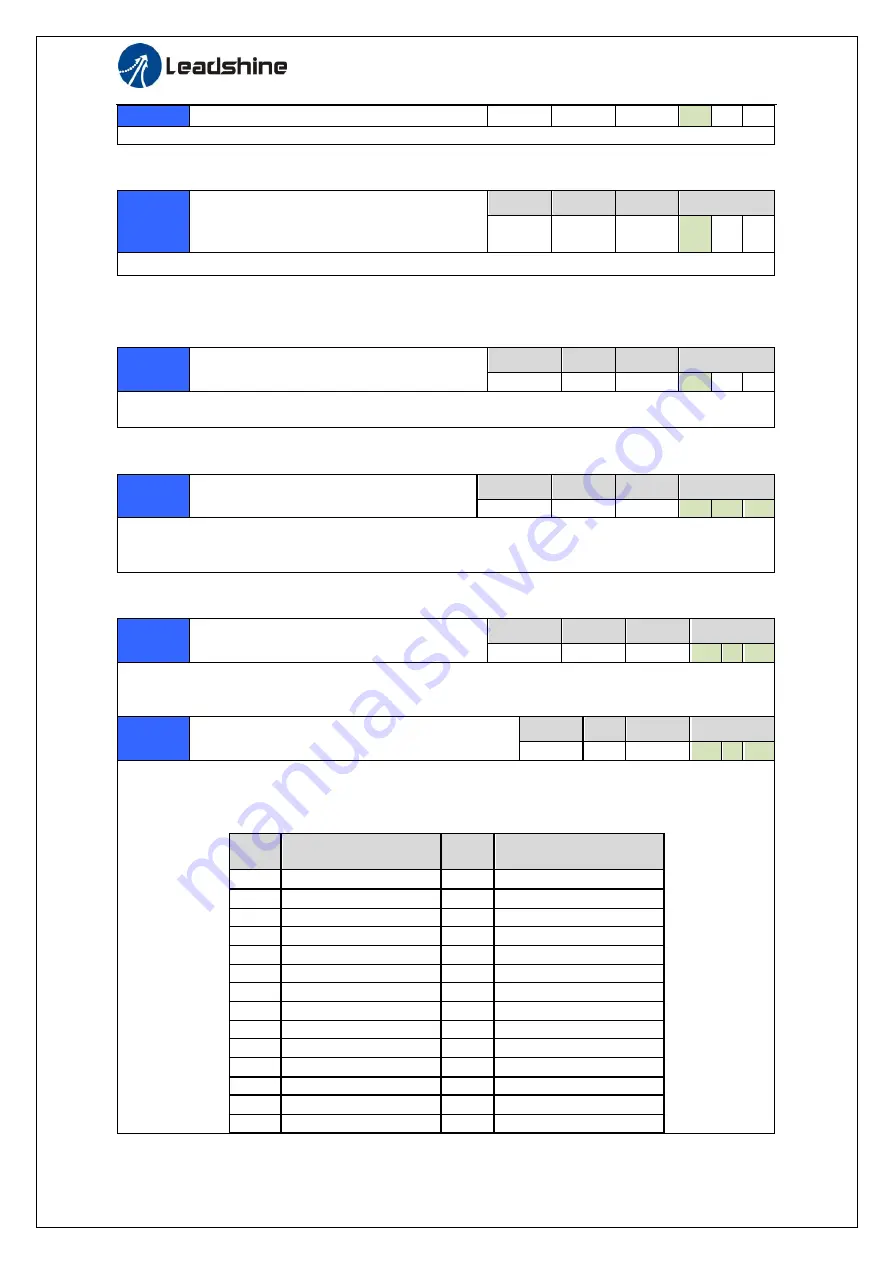
You can set up the time constant of the low pass filter (LPF) after the speed detection, in 32 steps
(0 to 31).Higher the setup, larger the time constant you can obtain so that you can decrease the motor
noise, however, response becomes slow.
You can set the filter parameters through the loop gain, referring to the following table:
Set
Value
Speed Detection Filter
Cut-off Frequency(Hz)
Set
Value
Speed Detection Filter
Cut-off Frequency(Hz)
0
2500
16
750
1
2250
17
700
2
2100
18
650
3
2000
19
600
4
1800
20
550
5
1600
21
500
6
1500
22
450
7
1400
23
400
8
1300
24
350
9
1200
25
300
10
1100
26
250
11
1000
27
200
12
950
28
175
13
900
29
150







































































