

























AKD2G-S Installation Manual, Safety 1 | 8 Electrical Installation
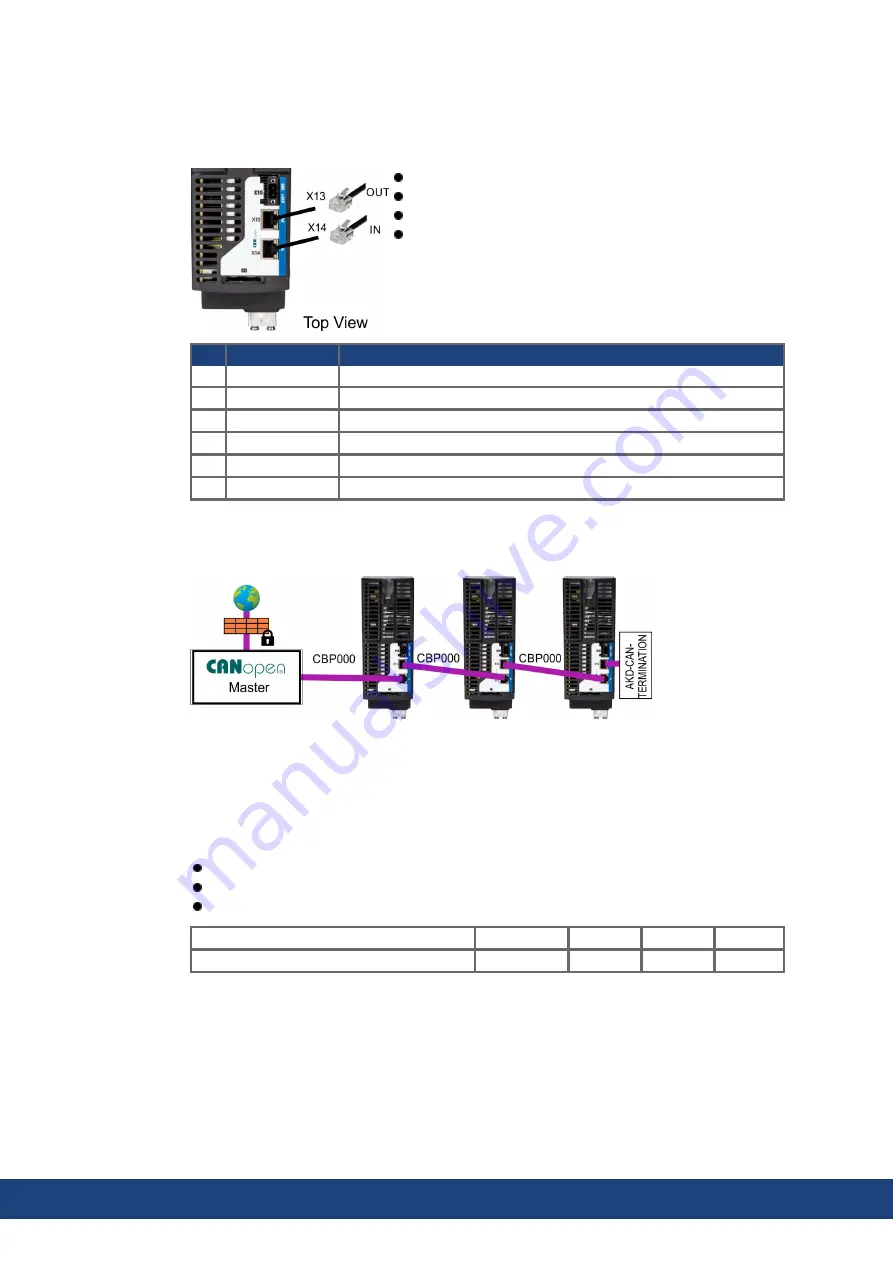
8.12 CAN-Bus Interface (X13/X14)
AKD2G drives with connectivity option
C
can be connected to a CAN-Bus by using two 6-pin
RJ25 connectors X13/X14.
RJ25
Up to 1000 kbit/s operation
Node ID to be set by WorkBench
Baudrate to be set by WorkBench
Pin Signal
Description
1
Termination
Internal Termination Resistor
2
Shield
Chassis
3
CAN_high
CAN bus high signal
4
CAN_low
CAN bus low signal
5
CAN_GND
CAN bus ground
6
Termination
Internal Termination Resistor
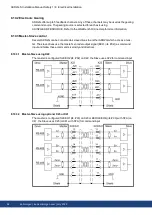
8.12.1 CAN-Bus Topology
We recommend the use of Kollmorgen CBP000 cables.
Cable requirements
To meet ISO 11898, a bus cable with a characteristic impedance of 120 Ω should be used.
The maximum usable cable length for reliable communication decreases with increasing
transmission speed.
As a guide, you can use the following values measured by Kollmorgen; however, these val-
ues are not assured limits:
Characteristic impedance: 100–120 Ω
Cable capacitance max.: 60 nF / 1000 m
Lead loop resistance: 159.8 Ω / 1000 m
Transmission Rate (kBaud)
1000
500
250
125
Maximum Cable Length (m)
25
100
250
500
Lower cable capacitance (max. 30 nF / 1000 m) and lower lead resistance (loop resistance,
115 Ω / 1000 m) allow larger distances. The characteristic impedance 150 ± 5 Ω requires ter-
minating resistor 150 ± 5 Ω.
Communication profile
For CANopen communication profile description refer to the manual "
AKD2G CAN-Bus Com-
munication
".
98
Kollmorgen | kdn.kollmorgen.com | July 2020







































































