





























Positioning module UVE8112, IMD10 DcSetup
programme
option
al
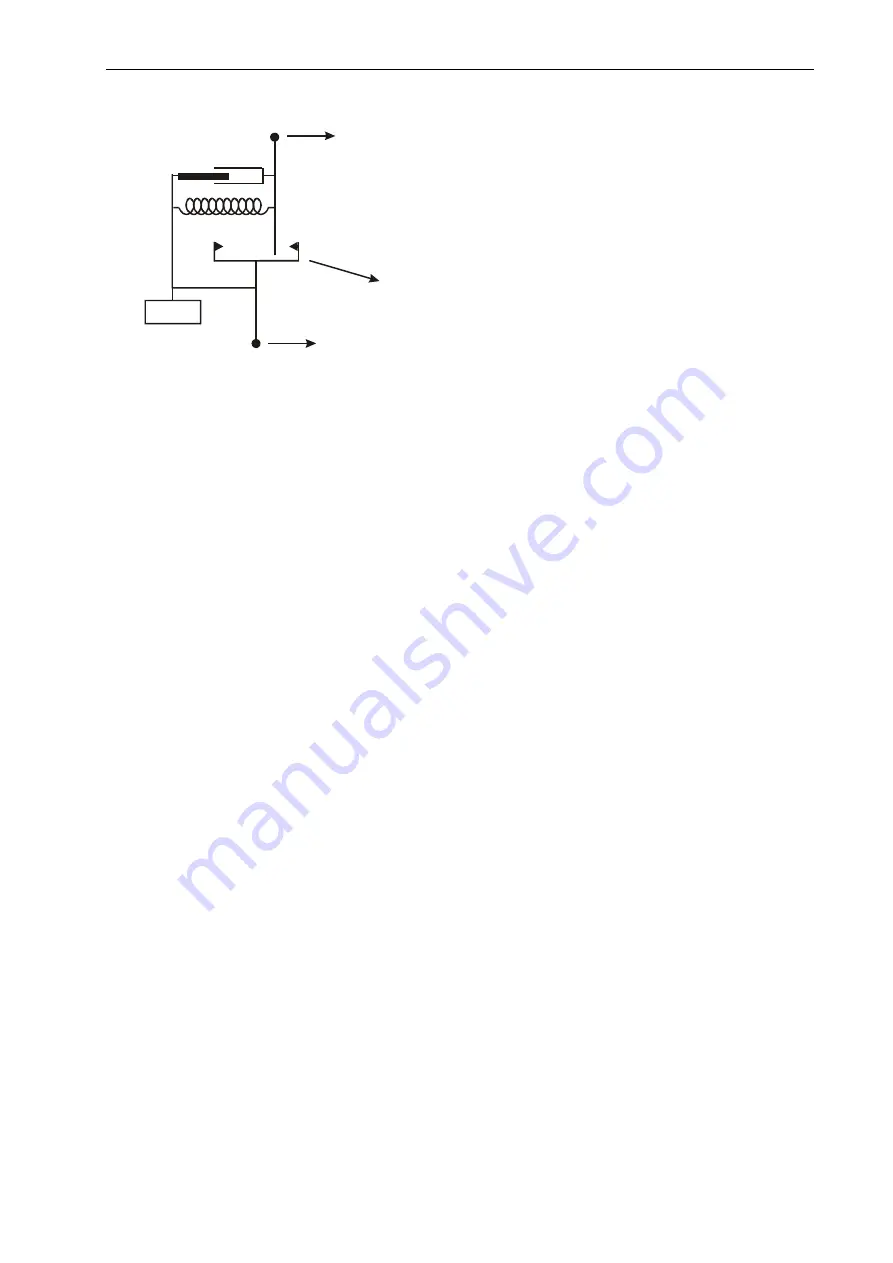
Target position
Target speed
Ground
Actual position
Actual speed
kd
kp
Overtravel limitation
Output= MAX
The
limi
ta
a valu
tion
of the
the
tting, a test signal can be used, too. For this, three rectangular
pulses are defined as target speed (the overall duration and amplitude can be set). The actual
en try different settings.
Some basic setting rules:
y
In case of a strong following, reduce kp and / or increase kd.
y
Too high a D proportion leads to a rough motor operation and to loud noises.
y
An increase of td corresponds to a duplication of the D proportion (half kd).
y
ki should not be greater than kp. Often, very small values suffice.
y
For the setting of the following limitation, a higher target speed should be chosen. The
reduction of the following limitation leads to a reduction of the following and a flattening of the
ramps. Reduce the following limitation up to the point, at which the ramp slope is still as high
as in case of a high following limitation. It might be possible to increase kp further. Then, the
“Hard limit” option can be activated in order to achieve a higher acceleration.
The requirements for the controller can differ considerably from application to application. A smooth
course of the actual speed with a small following (see Figure) e.g. is a good compromise for many
application purposes.
deviation between the target and the actual position cannot be greater than the following
tion, since the target position follows the actual position, if this distance is exceeded. Too great
e of an following limitation might lead to a permanent vibration of the axes. For the optimisa
following limitation, see Can Interpolation dia
If the
Hard limit
option is enabled, the controller output is set to its maximum values, when
following limit is achieved. Otherwise, it has a value corresponding to the deviation.
For the testing of the controller se
im
speed can be used to verify the controller setting. New control parameters are transferred only briefly
to the drive module during the test and are then replaced again by the previous parameters. The
parameters can be tested both at standstill as well as in motion.
In the beginning, it is best to use the default values and to only th
55
Summary of Contents for IMD1
Page 1: ...DC servo positioning module with CanOpen interface UVE8112 IMD10 www isel com ...
Page 66: ...DcSetup programme Positioning module UVE8112 IMD10 66 ...
Page 113: ...Positioning module UVE8112 IMD10 Appendix 113 Appendix UVE8112 package dimensions ...
Page 114: ...Appendix Positioning module UVE8112 IMD10 114 IMD10 package dimensions ...







































































