





























57
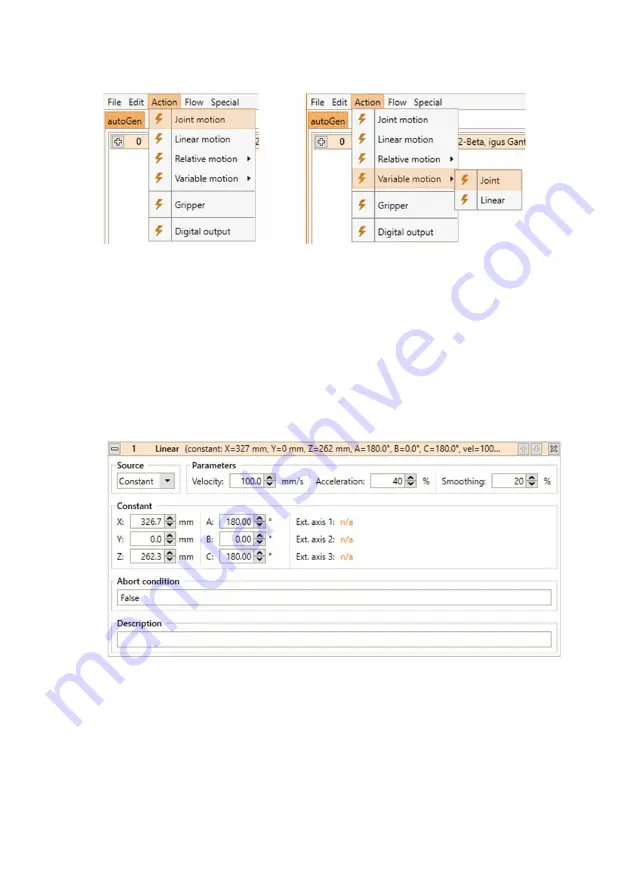
The Joint command can be accessed in iRC’s Program Editor under the menu entries
“Action”->”Joint motion” and “Action”->”Variable motion”->”Joint”.
8.5.4.
Linear Motion
The Linear command moves the robot to an (absolute) target position given in Cartesian
coordinates. The resulting motion of the tool center point (TCP) will follow a straight line. The
target position can be given in the following ways (choose corresponding “Source”):
“Constant”:
The target position is a constant given by Cartesian coordinates X,Y,Z and Euler
Angles A,B,C and positions of external axes if supported by the current robot
kinematic.
Summary of Contents for Drylin Delta
Page 1: ......
Page 2: ...1...
Page 14: ...13 4 Electrical Connections 4 1 Overview Figure 4 1 Overview of electrical connections...
Page 26: ...25 Figure 5 1 Schematic wiring of the safety components with the Support Module...
Page 79: ...78...
Page 80: ...79...
Page 81: ...80...





















































