





























48
6.1 Description of Position-Data Table
(1) No.
•
Indicate the position data number.
To enter an incremental movement, press the minus key in this column.
On the teaching pendant, a “=” will be displayed between the number
and position columns.
The minus key need not be pressed in the absolute mode.
(2) Target position (Position)
•
Enter the target position to move the actuator to, in [mm].
Absolute mode:
Enter the distance to the target actuator position from
the home.
Incremental mode: Enter the distance to the target actuator position from
the current position. A negative value can also be
entered (for movement in the negative direction
along the displayed coordinate axis).
No. Position
0
30
Absolute mode
30 mm from the home
1
10
Incremental mode
+10 mm from the current position
2
-10
Incremental mode
-10 mm from the current position
3
100
Absolute mode
100 mm from the home
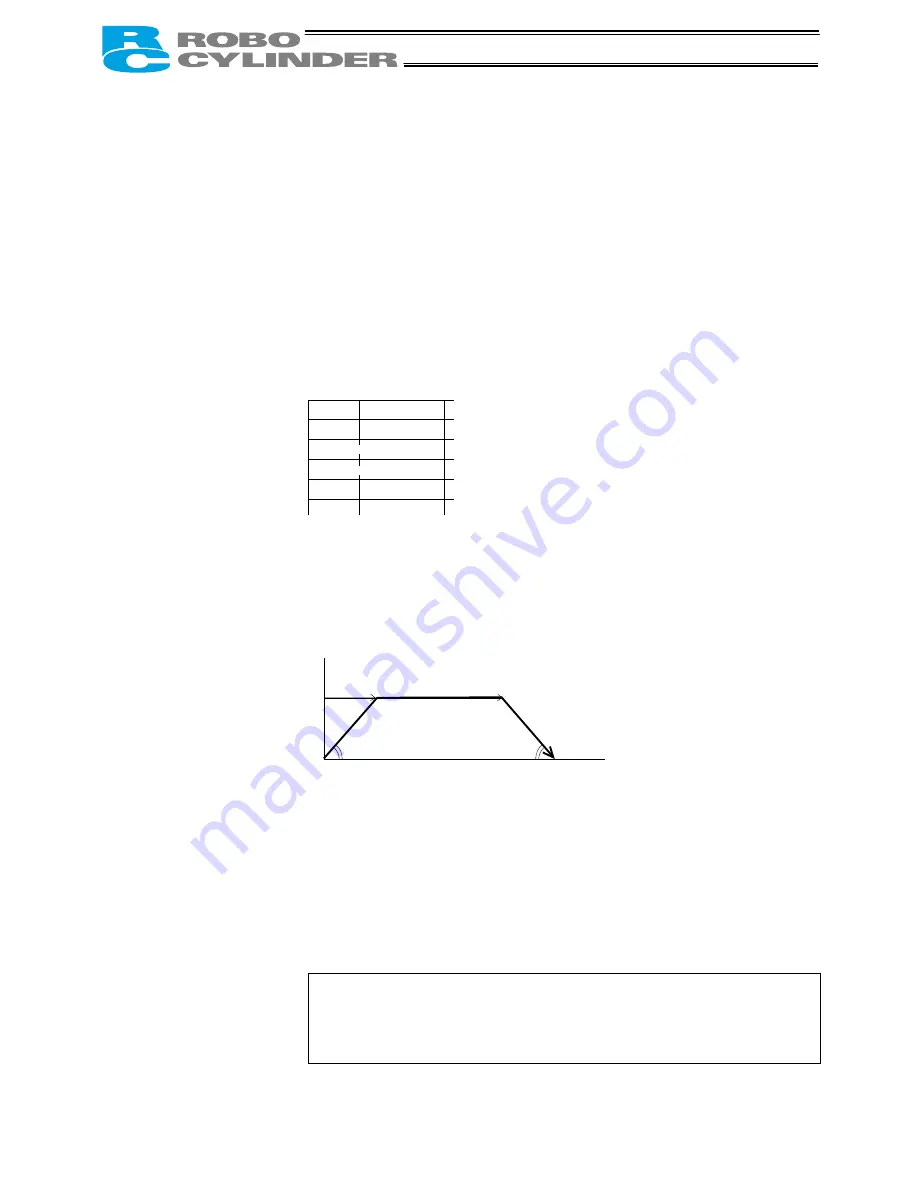
(3) Speed (Speed)
•
Enter the speed at which the actuator will be moved, in [mm/sec].
The default value varies depending on the actuator type.
(4) Acceleration/deceleration
(ACC)
•
Enter the acceleration/deceleration at which the actuator will be moved,
in [G].
The default value varies depending on the actuator type.
(5) Push (Push)
•
Select the positioning mode or push & hold mode.
The default value is “0.”
0:
Positioning mode (= Normal operation)
Other than 0: Push & hold mode [%]
•
To select the push & hold mode, enter the current-limiting value for the
servo motor during push & hold operation. Enter an appropriate value up
to 70% in accordance with the actuator type.
Be sure to refer to 6.1.1, “Relationship of Push Force at Standstill and
Current-Limiting Value” that specifies the relationship of the push force to
be applied to the load at standstill [kgf] on one hand, and the current-
limiting value on the other, for each actuator type.
=
=
Speed
Acceleration/deceleration (ACC)
Start Completion
Time
Acceleration/deceleration G --- MIN 0.01 G (Slow rise)
MAX 1.00 G (Quick rise) (The maximum
acceleration/deceleration G is set to 0.6 G on some models.)