

























1056748 03/2023
1056748 03/2023
63
62
Assembly
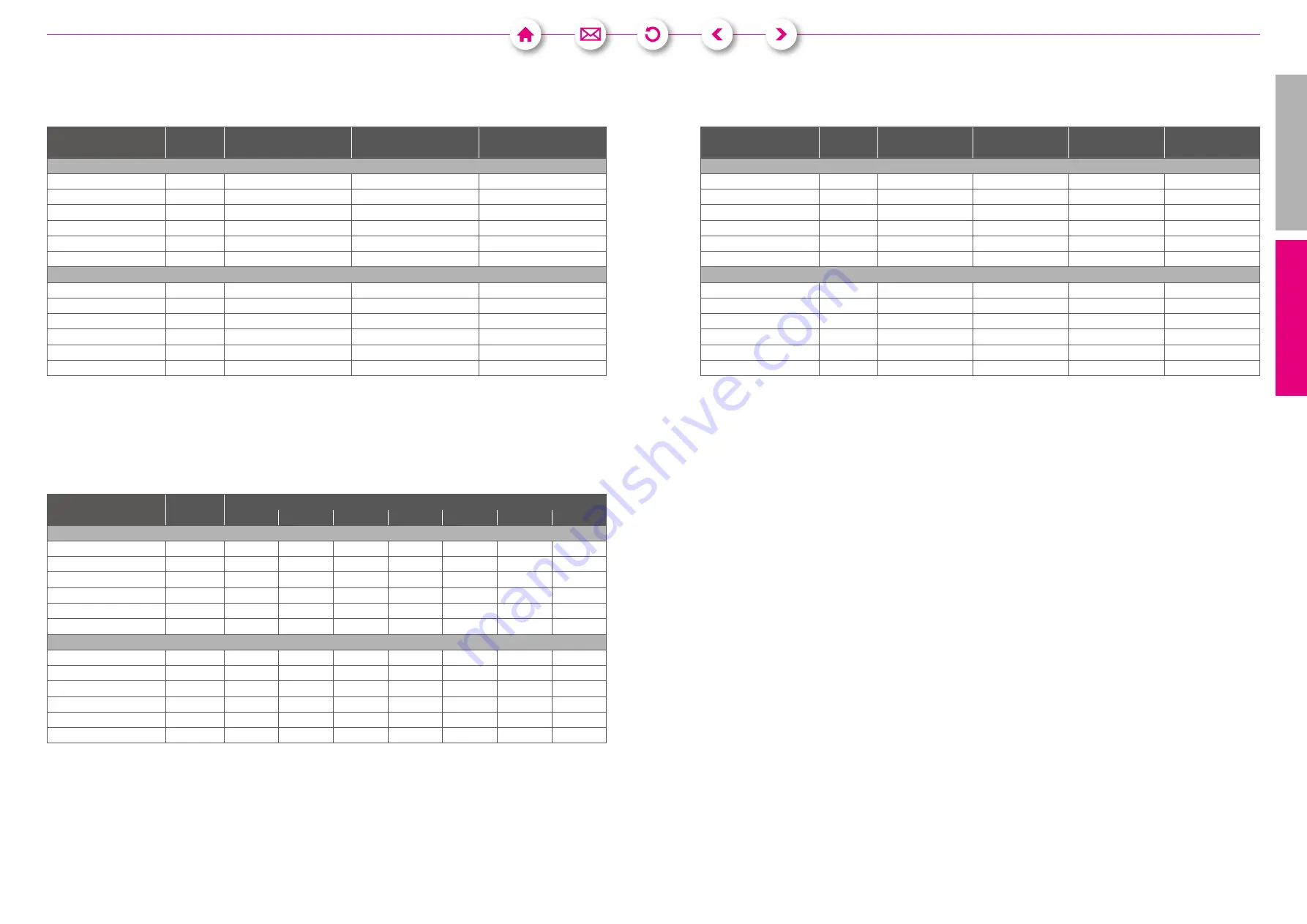
7.1.4 Servo actuators FHA-C Mini
The required load and enclosure mounting details are shown in the following table:
Table 16
Unit
FHA-8C
FHA-11C
FHA-14C
Load assembly
Number of screws
6
6
6
Screw size
M3
M4
M5
Screw quality
12.9
12.9
12.9
Pitch circle diameter
[mm]
25.5
33.0
44.0
Screw tightening torque
[Nm]
2.0
4.5
9.0
Transmittable torque
[Nm]
Housing assembly
Number of screws
4x∕
φ
3,4
4x
φ
4,5
4x
φ
5,5
Screw size
M3
M4
M5
Screw quality
8.8
8.8
8.8
Pitch circle diameter
[mm]
58
70
88
Screw tightening torque
[Nm]
1.2
2.7
5.4
Transmittable torque
[Nm]
The continuous hollow shaft can be used to pass through e.g. mechanical shafts, electrical cables, etc. The hollow shaft
rotates with the output speed of the actuator. No lateral forces may be applied to the hollow shaft. This can lead to
malfunctions of the actuator.
7.1.5 Servo actuators LynxDrive
The required load and enclosure mounting details are shown in the following table:
Table 17
Unit
LynxDrive
14A
17A
20A
25A
32A
40A
50A
Load assembly
Number of screws
6
6
8
8
8
8
8
Screw size
M4
M5
M6
M8
M10
M10
M14
Screw quality
12.9
12.9
12.9
12.9
12.9
12.9
12.9
Pitch circle diameter
[mm]
23
27
32
42
55
68
84
Screw tightening torque
[Nm]
4.5
9.0
15.0
37.0
74.0
74.0
201.0
Transmittable torque
[Nm]
48
91
206
720
1010
1240
4700
Housing assembly
Number of screws
6
6
6
8
12
8
12
Screw size
M4
M4
M5
M5
M6
M8
M8
Screw quality
12.9
12.9
12.9
12.9
12.9
12.9
12.9
Pitch circle diameter
[mm]
65
71
82
96
125
144
174
Screw tightening torque
[Nm]
4.5
4.5
9.0
9.0
15.0
37.0
37.0
Transmittable torque
[Nm]
137
147
274
600
1200
1680
4400
7.1.6 Servo actuators FLA
The required load and enclosure mounting details are shown in the following table:
Table 18
Unit
FLA-11A
FLA-14A
FLA-17A
FLA-20A
Load assembly
Number of screws
4
8
12
12
Screw size
M3
M3
M3
M3
Screw quality
12.9
12.9
12.9
12.9
Pitch circle diameter
[mm]
35
45
50
55
Screw tightening torque
[Nm]
2.0
2.0
2.0
2.0
Transmittable torque
[Nm]
29.2
75.0
83.3
91.7
Housing assembly
Number of screws
4
8
12
12
Screw size
M3
M3
M3
M3
Screw quality
12.9
12.9
12.9
12.9
Pitch circle diameter
[mm]
64
78
85
93
Screw tightening torque
[Nm]
2.0
2.0
2.0
2.0
Transmittable torque
[Nm]
53.3
130.0
212.5
232.5
7.2 Electrical connection
Electrical connections may only be made by qualified electricians.
7.2.1 Integrated system IHD
In contrast to the other servo actuators, a servo controller is already integrated in the IHD system. Therefore, cables
other than those offered for the rest of the product range must be used here.
In addition, it is possible to connect several systems in series, in a so called daisy chain. Connecting cables are
available for this purpose.
Notes for assignment
•
Digital output is used as digital input in the following IHD
•
STO signals are looped through
•
Analogue input is looped through (for example, one analogue setpoint can be used for several actuators at the same
time)
•
Logic voltage and DC link voltage are looped through
•
Communication lines are looped through (An IHD-internal 120 Ω resistor can be used for termination of CAN bus.
•
An external braking resistor can be connected to the input cable. This is used by all the braking resistors connected
in series. actuators are used. Here, too, the continuous current must be limited to 30 A.
Make sure that the maximum permissible DC current of 30 A or 32 A is not exceeded in the network.
Before connecting the actuators in series, make sure that they can be communicated with individually:
•
For the communication interface Ethernet, the IP addresses must be set in advance so that each system is assigned
its own address.
•
Different node IDs are to be assigned for the CANopen communication interface, which are to be used in the entire
No preparatory work is necessary for the EtherCAT communication interface, as the assignment is carried out by
the master on the basis of the physical structure of the EtherCAT network. When using the communication type EoE
(Ethernet over EtherCAT), an assignment of IP addresses is required, just as with regular Ethernet communication.
CAN network must be unique.
There are two variants to choose from: A hybrid cable solution developed by Harmonic Drive SE and a solution
consisting of standard industrial cables.
Deutsch
English
Assembly Instructions Servo Actuators







































































