





























High Performance General Inverter Converter User Manual Chapter 6 Fault Diagnosis and Countermeasures
— 49 —
Chapter VI Fault Diagnosis and Countermeasures
The following fault types will be encountered during the use of the frequency converter. Please refer to the
following table for simple fault analysis and handling. If the fault cannot be resolved, please contact the technical
support promptly.
Digital fault code and English letter fault code comparison are listed, convenient for users with different habits to
compare.
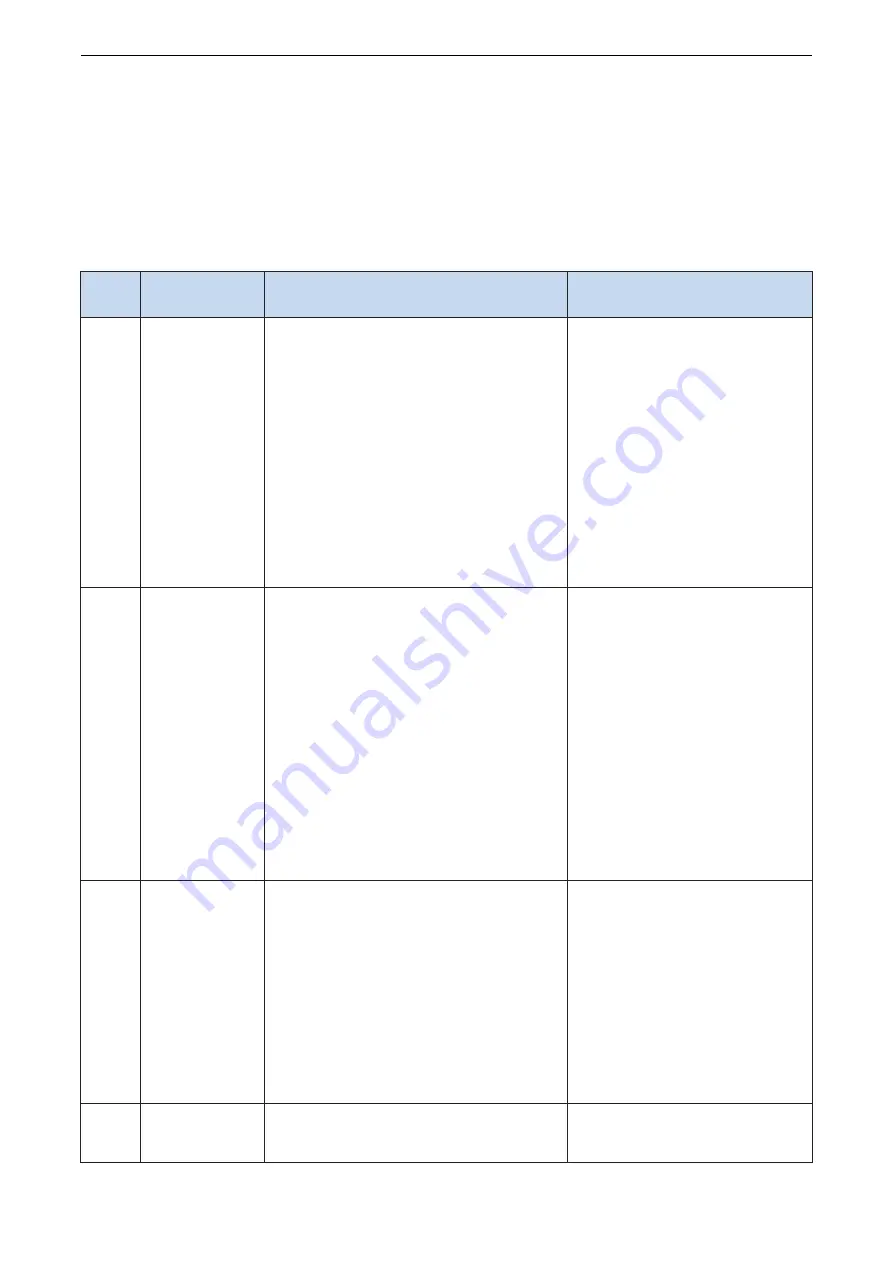
hitch
code
Fault name
Troubleshooting
Troubleshooting
countermeasures
Err 01
(O ut)
Inverter unit
protection
1. Short circuit of the inverter output loop
2. The wiring of the motor and the inverter is
too long
3. Overheating of modules
4. The internal wiring of the inverter is loose
5. The main control board is abnormal
6. The drive board is abnormal
7. Inverse module is abnormal
8, Motor wire or motor leakage or short circuit
1. Troubleshoot the peripheral faults
2. Install the reactor or the output
filter
3. Check the air duct and fan and
eliminate the existing problems
4. Plug in all the connecting cables
5. Seek technical support
6. Seek technical support
7. Seek technical support
8. Check the motor wire or motor to
ensure its normal operation
Err02
(OC1)
Accelerate over
current
1. There is ground or short circuit
2. The control mode is a vector and has no
parameter identification
3. Acceleration time is too short
4. Manual torque lifting or V / F curve is not
appropriate
5. Low voltage
6. Start the rotating motor
7. Sudden loading during acceleration
8. The inverter type selection is too small
1. Troubleshoot the peripheral faults
2. Identify the motor parameters
3. Increase the acceleration time
4. Adjust the manual lifting torque or
V / F curve
5. Adjust the voltage to the normal
range
6. Speed tracking start or start after
the motor stops
7. Cancel the sudden load
8. Choose the frequency converter
with a larger power level
Err03
(OC2)
Slow down over
current
1. There is ground or short circuit
2. The control mode is a vector and has no
parameter identification
3. The deceleration time is too short
4. Low voltage
5. Add a sudden load during the deceleration
process
6. No brake unit and brake resistance are
installed
1. Troubleshoot the peripheral faults
2. Identify the motor parameters
3. Increase the deceleration time
4. Adjust the voltage to the normal
range
5. Cancel the sudden load
6. Install the brake unit and the
resistance
Err04
(OC3)
Constant speed
over current
1. There is ground or short circuit
2. The control mode is a vector and has no
1. Troubleshoot the peripheral faults
2. Identify the motor parameters