





























CMMOST-...-LKP
Festo – GDCP-CMMOST-LK-S1-Z6 – 2017-05a – English
29
2.2
Functional description
The STO function is requested via 2 channels by means of switch S1, whereby the control voltage
(+24 V DC, logic
è
Fig. 2) is switched off at both control ports STO1 and STO2.
The control ports are of equal value, i.e. it makes no difference in which sequence they are connected.
The motor controller monitors the status of the control ports and switches off the driver supply for the
output stage as soon as logic 0 (0 V) is present at
one
of the control ports. The power supplied to the
motor via the output stage is interrupted:
– Behaviour of the drive when the motor is running: The movement of the drive is not decelerated via
a braking ramp of the motor controller. The drive continues to move uncontrollably through inertia
or external forces until it stops by itself.
– Behaviour of the drive when the motor is stopped: The drive is unregulated and can move due to
external forces.
The
2-channel
disconnection of the output stage is indicated by the DIAG acknowledgment contact
(semiconductor relay). The status of the STO function can be reported to an external safety switching
device for diagnostics, for example, via the acknowledgment contact. The diagnostics contact is not
evaluated with regard to safety.
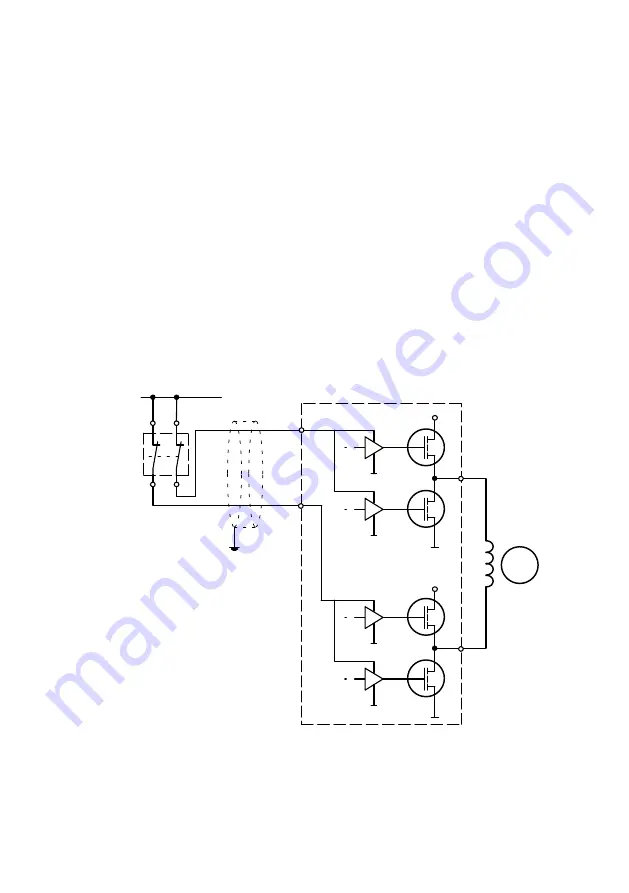
3
2
1
STO1
STO2
+24 V DC
M
+24 V DC load
+24 V DC load
2x
3
4
1
Input circuit (e.g. safety switching device)
2
Power output stage in CMMO-ST
(only one phase shown)
3
Driver supply
4
Motor (only one phase shown)
Fig. 3
“Safely switched off torque” functional principle







































































