





























Setup & Operation 2. Specifications
24
G10 / G20 Rev.20
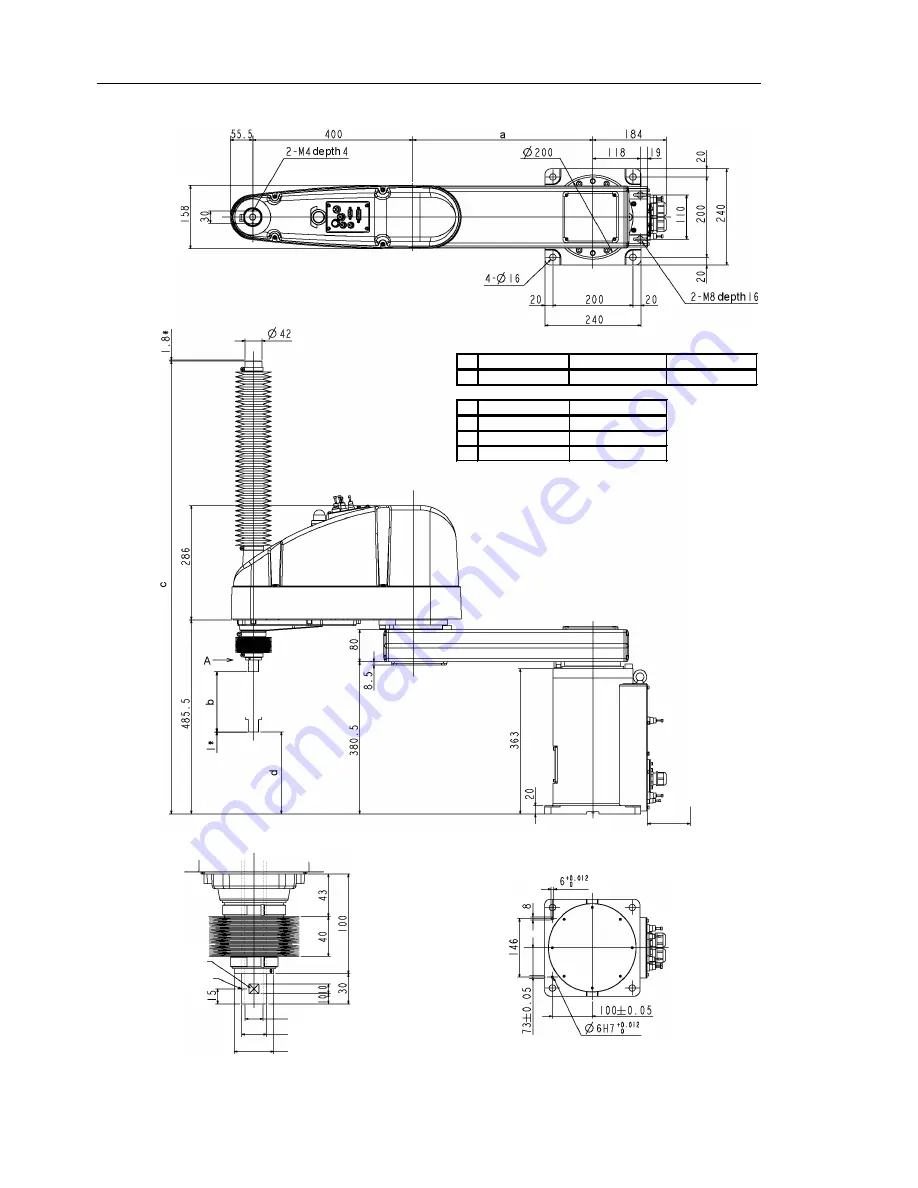
G10-65*P
G10/G20-85*P
G20-A0*P
a
250
450
600
G10/G20-**1P G10/G20-**4P
b
150
390
c
874
1133
d
205.5
−
34.5
Conical hole ø4,90°
1 mm flat cut
Max.ø18 through hole
ø25 h7 shaft diameter
90 or more
Space for cables
(*) indicates the stroke margin by mechanical stop.
ø39.5 mechanical stop diameter
(Mount eyebolt
at shipment)
Detail of “A”
(Calibration point position of Joints #3 and #4)
Reference through hole
(View from the bottom of the base)
Root both side chamfer C0.5
Summary of Contents for G10 Series
Page 1: ...Rev 20 EM183R3619F SCARA ROBOT G10 G20 series MANIPULATOR MANUAL ...
Page 2: ...MANIPULATOR MANUAL G10 G20 series Rev 20 ...
Page 8: ...vi G10 G20 Rev 20 ...
Page 14: ......
Page 102: ...Setup Operation 5 Motion Range 90 G10 G20 Rev 20 ...
Page 104: ......



































































