




























Setup & Operation 5. Motion Range
G10 / G20 Rev.20
83
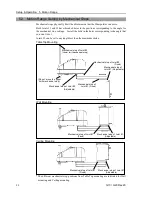
(1) Turn OFF the Controller.
(2) Install a hexagon socket head cap bolt into the hole corresponding to the setting angle,
and tighten it.
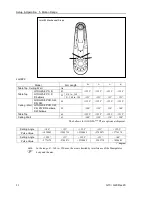
Joint Hexagon socket head cap
bolt (fully threaded)
The number
of bolts
Recommended
tightening torque
1
M12 × 20
1
127.4 N
⋅
m (1300 kgf
⋅
cm)
2
M10 × 10
2
73.5 N
⋅
m (750 kgf
⋅
cm)
(3) Turn ON the Controller.
(4) Set the pulse range corresponding to the new positions of the mechanical stops.
Be sure to set the pulse range inside the positions of the mechanical stop range.
Example: Using G10-854S
The angle of Joint #1 is set from
–
105 degrees to +105 degrees.
The angle of Joint #2 is set from
–
122.5 degrees to +122.5 degrees.
EPSON
RC+
Execute the following commands from the [Command Window].
>JRANGE 1,-436907,5679787
' Sets the pulse range of Joint #1
>JRANGE 2,-2230045,2230045
' Sets the pulse range of Joint #2
>RANGE
' Checks the setting using Range
-436907,5679787,-2230045,2230045,-1946420
,0,-1951517, 1951517
(5) Move the arm by hand until it touches the mechanical stops, and make sure that the
arm does not hit any peripheral equipment during operation.
(6) Operate the joint changed at low speeds until it reaches the positions of the minimum
and maximum pulse range. Make sure that the arm does not hit the mechanical
stops. (Check the position of the mechanical stop and the motion range you set.)
Example: Using G10-854S
The angle of Joint #1 is set from
–
105 degrees to +105 degrees.
The angle of Joint #2 is set from
–
122.5 degrees to +122.5 degrees.
EPSON
RC+
Execute the following commands from the [Command Window].
>MOTOR ON
' Turns ON the motor
>CP ON
' Enters low-power mode
>SPEED 5
' Sets at low speeds
>PULSE -436907,0,0,0
' Moves to the min. pulse position of Joint #1
>PULSE 5679787,0,0,0
' Moves to the max. pulse position of Joint #1
>PULSE 2621440,-2230045,0,0
' Moves to the min. pulse position of Joint #2
>PULSE 2621440,2230054,0,0
' Moves to the max. pulse position of Joint #2
The Pulse command (Go Pulse command) moves all joints to the specified positions
at the same time. Specify safe positions after considering motion of not only the
joints whose pulse range have been changed, but also other joints.
F
NOTE
Summary of Contents for G10 Series
Page 1: ...Rev 20 EM183R3619F SCARA ROBOT G10 G20 series MANIPULATOR MANUAL ...
Page 2: ...MANIPULATOR MANUAL G10 G20 series Rev 20 ...
Page 8: ...vi G10 G20 Rev 20 ...
Page 14: ......
Page 102: ...Setup Operation 5 Motion Range 90 G10 G20 Rev 20 ...
Page 104: ......