





























Maintenance 8. Arm #4
G10 / G20 Rev.20
171
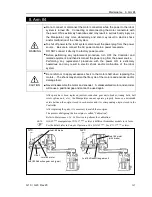
(6) When you use the plate of 3-point mounting,
mount the plate with pressing it to the Joint #4
motor.
Be sure to keep the connectors connected to the
battery unit.
If connectors of the battery unity are disconnected,
you need to perform calibration again.
When you use the plate of 4-point mounting, you
do not have to mount the plate.
3-point mounting
Plate
Battery unit
(7) Connect the connectors X241, X41, and X64.
(8) Re-bundle the cables in their original positions with a wire tie removed in step (5).
Do not allow unnecessary strain on the cables.
(9) Install the arm top cover and the arm bottom cover.
For details, refer to
Maintenance: 3. Covers
.
(10) Perform the calibration of Joint #4.
For details on the calibration method, refer to
Maintenance: 14. Calibration
.
NOTE
Summary of Contents for G10 Series
Page 1: ...Rev 20 EM183R3619F SCARA ROBOT G10 G20 series MANIPULATOR MANUAL ...
Page 2: ...MANIPULATOR MANUAL G10 G20 series Rev 20 ...
Page 8: ...vi G10 G20 Rev 20 ...
Page 14: ......
Page 102: ...Setup Operation 5 Motion Range 90 G10 G20 Rev 20 ...
Page 104: ......