


























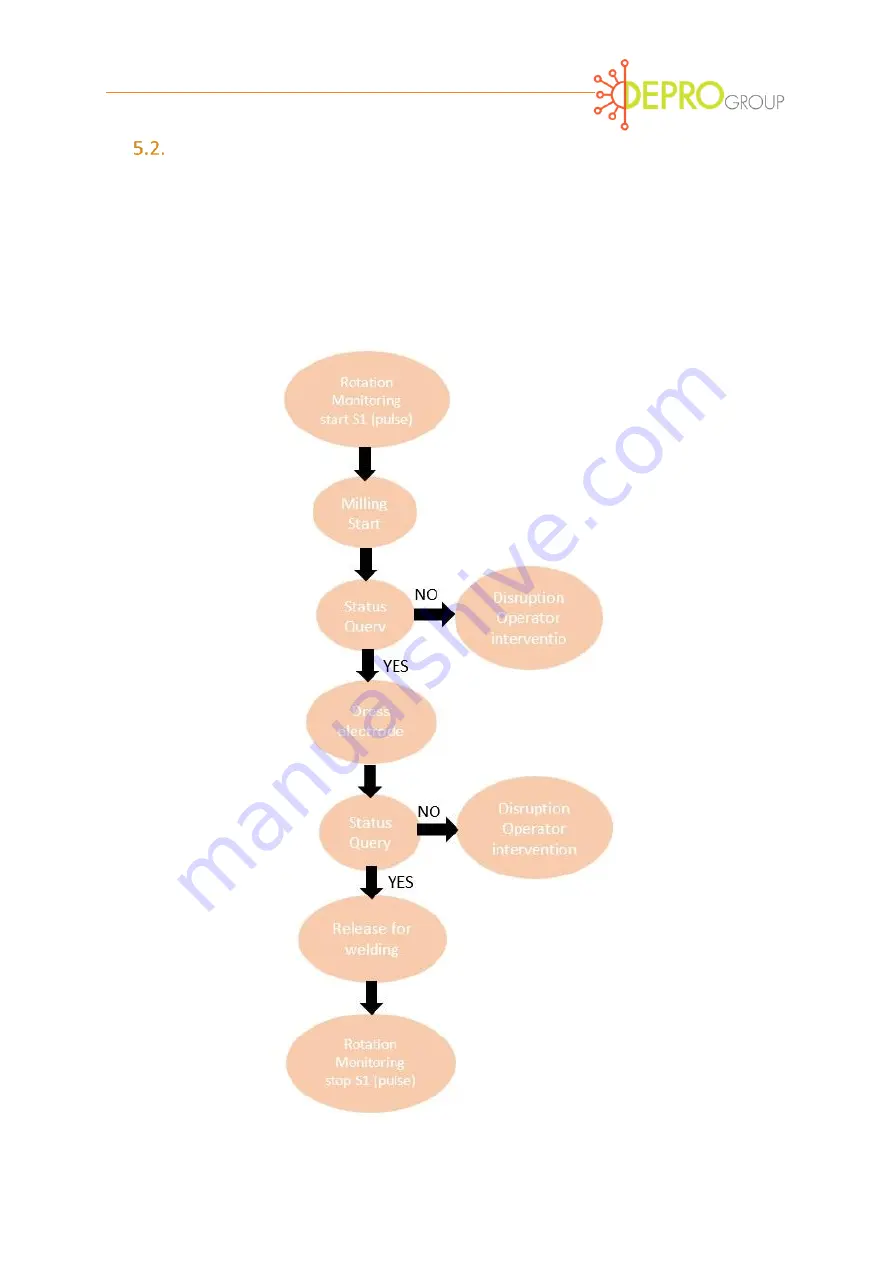
Milling sub-process:
The sub-process of MILLING (Figure 5.2.1) contains output signals (e. g. output MILLING) and
status feedback (e. g. input MONITORING ROTATION). Make sure that complete signal
exchange is operating correctly before determining the spatial coordinates on the welding
robot in accordance with the following sections. This includes the ability to limit the duration
of milling with closed welding guns using several rotation pulses.
Figure 7 Sub-process milling







































































