





























Liquiline CM442R/CM444R/CM448R
Operation
Hauser
91
10.6.2 Controller
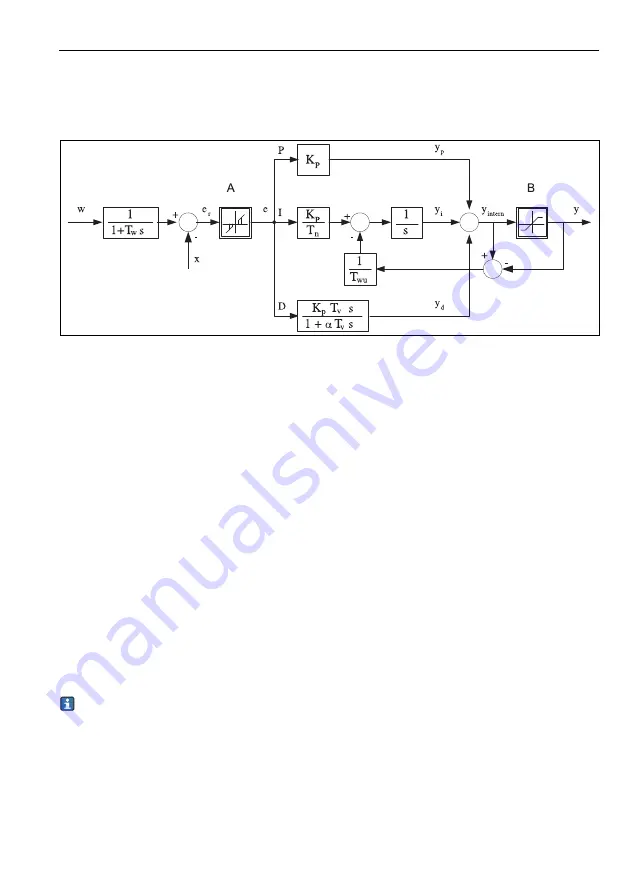
Controller structure in Laplace representation
The controller structure of the device comprises set point damping at the input to prevent erratic
changes in the manipulated variable if the set point changes. The difference between the set
point w and the controlled variable (measured value) X results in the control deviation which is
filtered by a neutral zone.
The neutral zone is used to suppress control deviations (e) that are too small. The control
deviation thus filtered is now fed to the actual PID controller which divides into three parts
based on the P (proportional), I (integral) and D (derivative) values (top-down). The integral
section (middle) also comprises an anti-windup mechanism for limiting the integrator. A
low-pass filter is added to the D-section to damp hard D-terms in the manipulated variable. The
sum of the 3 sections results in the internal controller manipulated variable which is limited
according to the settings (for PID-2s to -100% to +100%).
The graphic does not illustrate a downstream filter for limiting the rate of change of the
manipulated variable (can be configured in the menu in "Max Y change rate /s").
In the menu do not configure the gain K
p
. Instead configure the reciprocal value, the
proportional band X
p
(K
p
=1/X
p
).
a0015007
Fig. 67: Block diagram of the controller structure
A
B
K
p
T
n
T
v
T
w
T
wu
P
Neutral zone
Output limiting
Gain (P-value)
Integral action time (I-value)
Derivative action time (D-value)
Time constant for set point damping
Time constant for anti-windup feedback
Proportional value
I
D
T
v
e
w
x
y
Integral value
Derivative value
Damping time constant with
= 0 to 1
Control deviation
Set point
Controlled variable
Manipulated variable
Summary of Contents for Liquiline CM442R
Page 2: ......
Page 170: ...Liquiline CM442R CM444R CM448R 170 ...
Page 171: ...Liquiline CM442R CM444R CM448R Endress Hauser ...
Page 172: ...www addresses endress com ...







































































