





























2.3.4
CAN Network Mode
In
CAN Network
mode you can control your motor through CANopen
®
bus protocol.
For further information about CANopen
®
protocol, please refer to CiA
®
DSP402
protocol (version 3.0.1.15) and UNDRIVE CANopen
®
Manual.
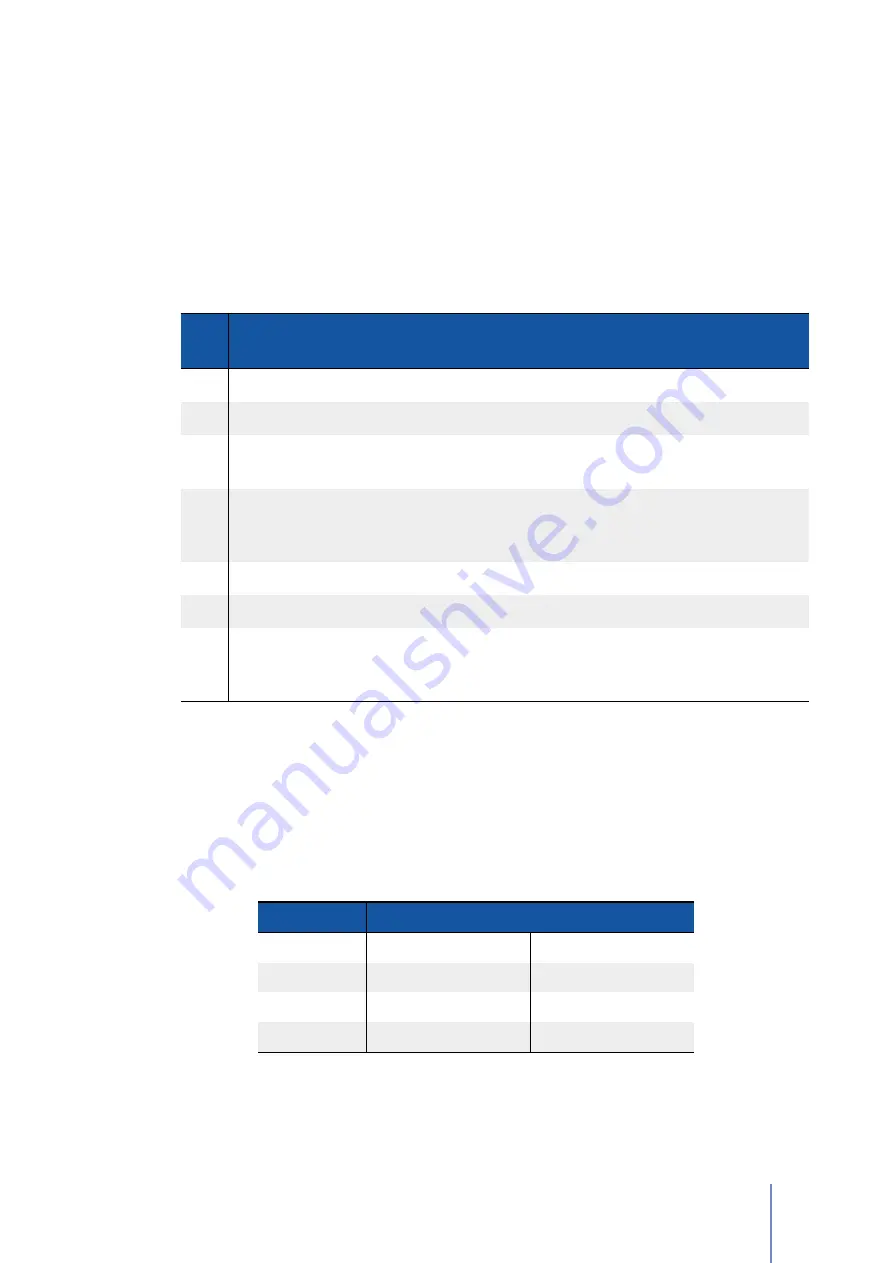
A description of the inputs and outputs connections for this operating mode is shown
in Table 2.8
Table 2.8:
UNIDRIVE I/O definitions for
Can Network
Mode
P
IN
I/O
T
YPE
N
AME
D
ESCRIPTION
16
IN3
BWD
It could be used as negative limit switch
Optional
17
IN4
FWD
It could be used as positive limit switch
Optional
25
IN5
HOME
SENSOR
It could be used as home switch
Optional
26
IN6
EMERGENCY
Emergency input should always be
supplied, otherwise UNIDRIVE stops
motor rotation and unlocks motor brake.
Mandatory
27
IN7
CAN ADR0
It can be used as CAN address selector 0
Optional
28
IN8
CAN ADR1
It could be used as CAN address selector 1
Optional
29
OUT4
ALARM
Alarm output, it changes its current state
whenever an alarm is present. See Section
In this operating mode is needed to set the correct CANopen
®
parameters via
Telemetry Panel (See Section 3.4.4).
In case that the CAN address is set to
0
through Telemetry panel, after switch-on it
is possible to appoint the node-ID depending on two digital inputs: CAN ADR0 and
CAN ADR1, in the following way:
CAN N
ODE
I
NPUT
C
ONFIGURATION
1
CAN ADR1
*
GND
CAN ADR0
*
GND
2
CAN ADR1
*
GND
CAN ADR0
*
+24V
3
CAN ADR1
*
+24V
CAN ADR0
*
GND
4
CAN ADR1
*
+24V
CAN ADR0
*
+24V
2.3
Standard Wiring Diagrams and Wiring Instructions
27
Summary of Contents for UNIDRIVE M series
Page 1: ...Brushless Edition Rev B UNIDRIVE M Series Application Reference Manual...
Page 10: ...6...
Page 40: ...36...
Page 70: ...66...
Page 72: ...68...
Page 80: ...76...
Page 84: ...Elife International 2016 www elifeinternational com...







































































