


















SHENZHEN ECON TECHNOLOGY CO.,LTD
User Manual For CANopen Hybrid Servo Driv
Ain
Analogy input, input range 0-5V
gnd
Analogy input reference terminal negative
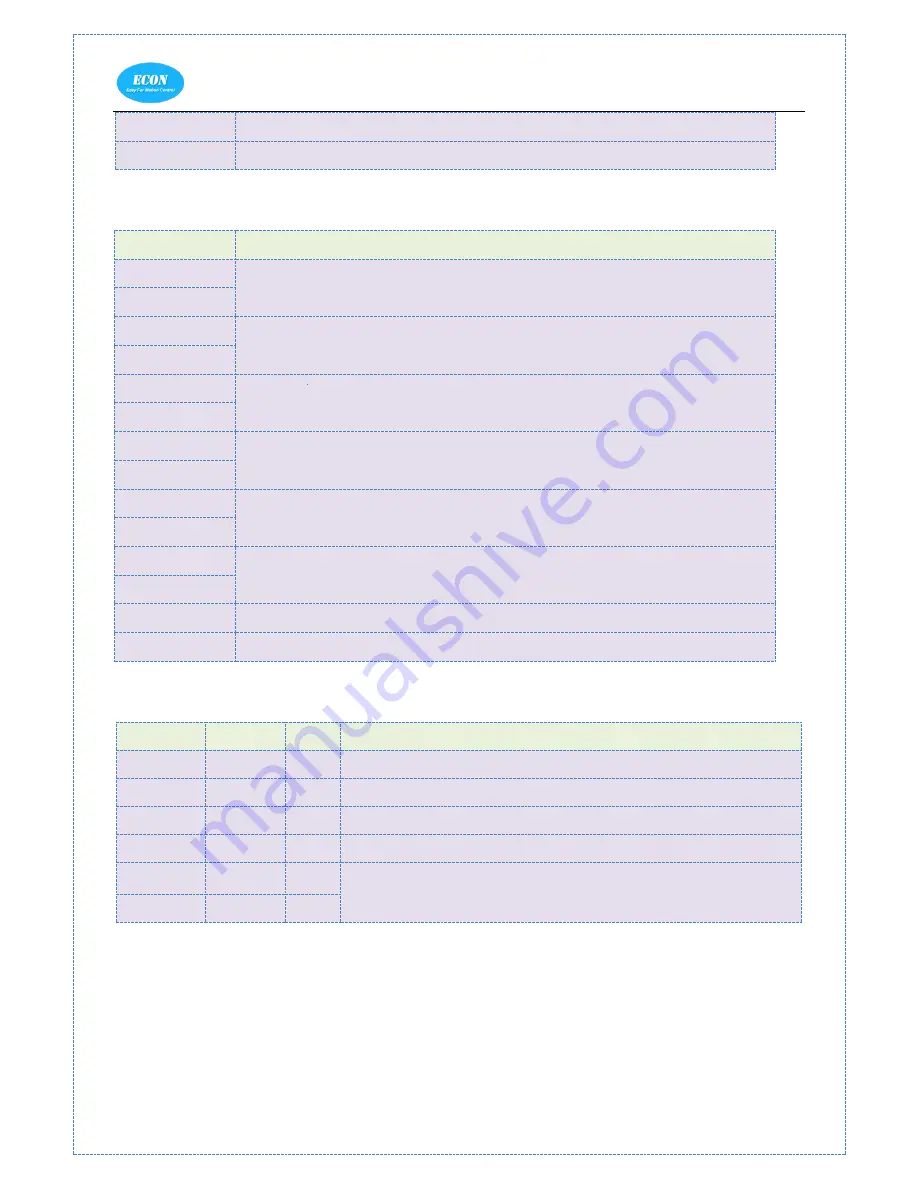
6.2 Encoder Feedback and hall signal Connector
Pin Function
Details
ea+
Encoder channel A input
ea-
eb+
Encoder channel B input
eb-
ez+
Encoder channel Z input(if there is Z signal in encoder ,no connection needed )
ez-
eu+
Hall U channel U input, special for dc brushless servo, open loop/hybrid servo no
connection needed
eu-
ev+
Hall V channel U input, special for dc brushless servo, open loop/hybrid servo no
connection needed
ev-
ew+
Hall W channel U input, special for dc brushless servo, open loop/hybrid servo no
connection needed
ew-
5V
Provide 5V+ dc power to motor encoder and Hall components, current 100mA
gnd
5V-
6.3 Power and Motor
Pin
Definition I/O
Description
1
A+
O
Motor Phase A+
2
A-/U
O
Motor Phase A- (U for dc brushless servo motor)
3
B+ /V
O
Motor Phase B+ (V for dc brushless servo motor)
4
B- /W
O
Motor Phase B- (W for dc brushless servo motor)
5
+VDC
I
15-50VDC,36VDC is recommended, leaving rooms for voltage fluctuation
and back-EMF.
6
GND
GND
Power supply voltage between the provisions of the normal work, E5-CAT driver is best to use non-regulated DC
power supply, can also use the transformer step-down + bridge rec capacitor filter. However, take care that
the peak value of the rectified voltage ripple does not exceed its maximum specified voltage. It is recommended
that users use DC voltage lower than the maximum voltage to supply power and avoid the fluctuation of power grid
beyond the working range of driver voltage.
If you are using a regulated switching power supply, be aware that the output current range of the switching power





















































