

















43
17. THEORY OF FISHFINDER
1
.
THEORY OF FISHFINDER
●
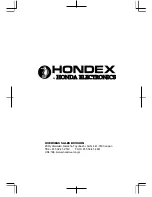
Theory of fishfinder is same as echo among hills
Ultrasonic wave transmitted from the transducer directly beneath the vessel is
reflected at the sea bottom and received by transducer.
Fishfinder indicates the depth by calculating the round-trip time to distance.
Also, the unit shows the color image of fish school size/density or sea floor condition
according to the strength of reflected wave.
Ultrasonic wave runs at 1500m/sec inside the water. Therefore, the depth to fish
school and sea bottom can be captured by calculating the round-trip time.
e.g.) 1sec is round-trip time from sea bottom.
Reflection from
fish school
Reflection from
sea bottom
Transducer
Round-trip
Round-trip distance=1500m/sec×1sec
=1500m
The depth is half the size, so
Depth=1500m÷2
●
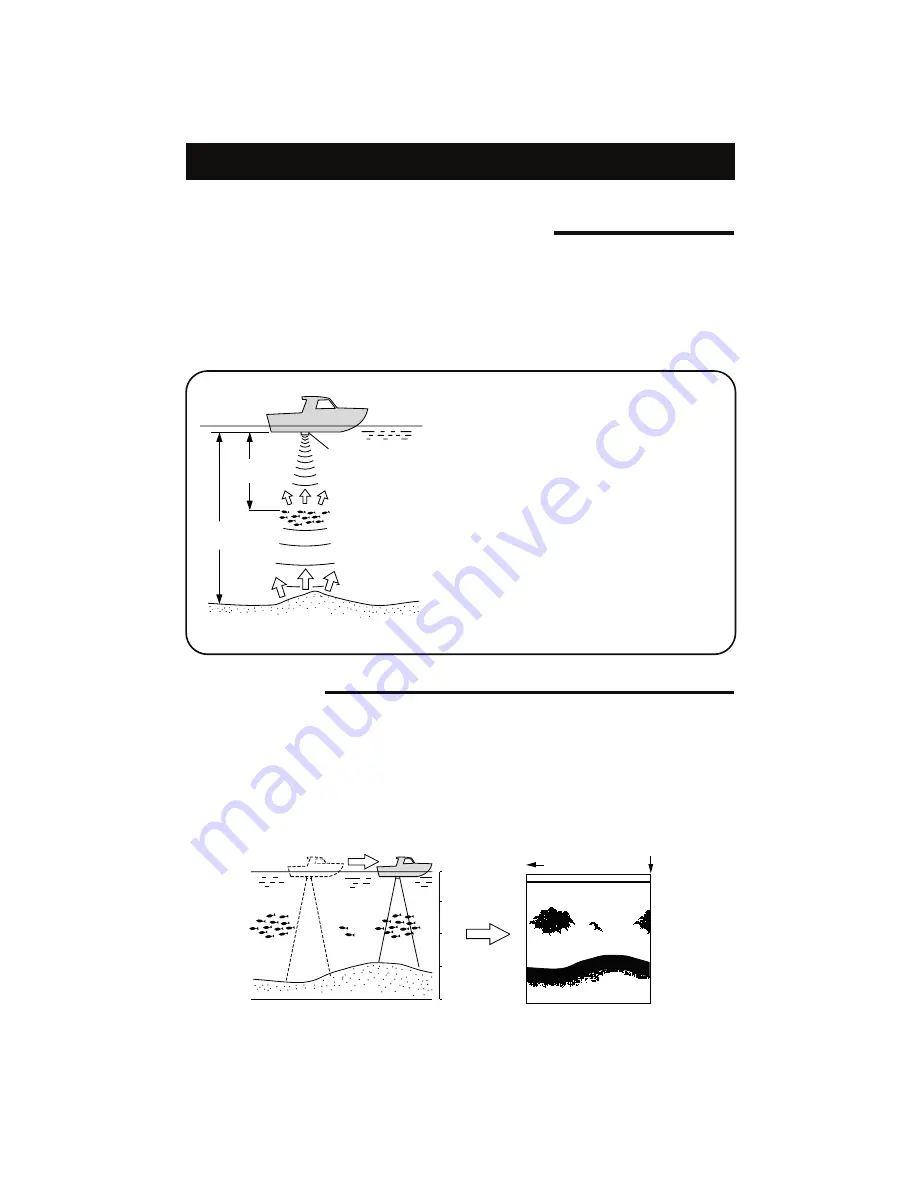
Display Method
Current image is shown at 1
st
line of right edge after processing the reflected wave of
transmitted ultrasonic. The line image previously located at the right edge moves to
one line to the left. Keep executing this operation to create the cross section view.
Therefore, the latest image beneath the vessel is located at the right edge. More left
side the image moves, more past image the screen shows.
You can assume that fishfinder screen shows the image from the side view. The sea
floor shape can be only captured when sailing the vessel. No matter how the bottom is
shaped, the image shows the flat bottom if the vessel is stopped.
※
There is no relationship between vessel speed and image line speed.
time 1sec
Round-trip
time 0.5sec
=750m
0.5sec is round-trip time from fish school
Round-trip distance=1500m/sec×0.5sec
=750m
The depth is half the size, so
Depth=750m÷2
=375m
0
10
20
30
40
Current image
Past image






















































