





























PMAC2A-PC/104
Machine Connections
15
setup, through the I-variables I9n2. However, for the following reasons, the same type of switches used
for over-travel limits are recommended:
•
Normally closed switches are proven to have greater electrical noise rejection than normally open
types.
•
Using the same type of switches for every input flag simplifies maintenance stock and
replacements.
Motor signals connections
Incremental Encoder Connection
Each JMACH1 connector provides two +5V outputs and two logic grounds for powering encoders and
other devices. The +5V outputs are on pins 1 and 2; the grounds are on pins 3 and 4. The encoder signal
pins are grouped by number: all those numbered 1 (CHA1+, CHA1-, CHB1+, CHC1+, etc.) belong to
encoder #1.
The encoder number does not have to match the motor number, but usually does.
Connect
the A and B (quadrature) encoder channels to the appropriate terminal block pins. For encoder 1, the
CHA1+ is pin 5, CHB1+ is pin 9.
If you have a single-ended signal, leave the complementary signal pins
floating -- do not ground them.
However, if single-ended encoders are used, please check the settings of
the resistor packs (see the
Hardware Setup
section for details). For a differential encoder, connect the
complementary signal lines -- CHA1- is pin 7, and CHB1- is pin 11. The third channel (index pulse) is
optional; for encoder 1, CHC1+ is pin 13, and CHC1- is pin 15.
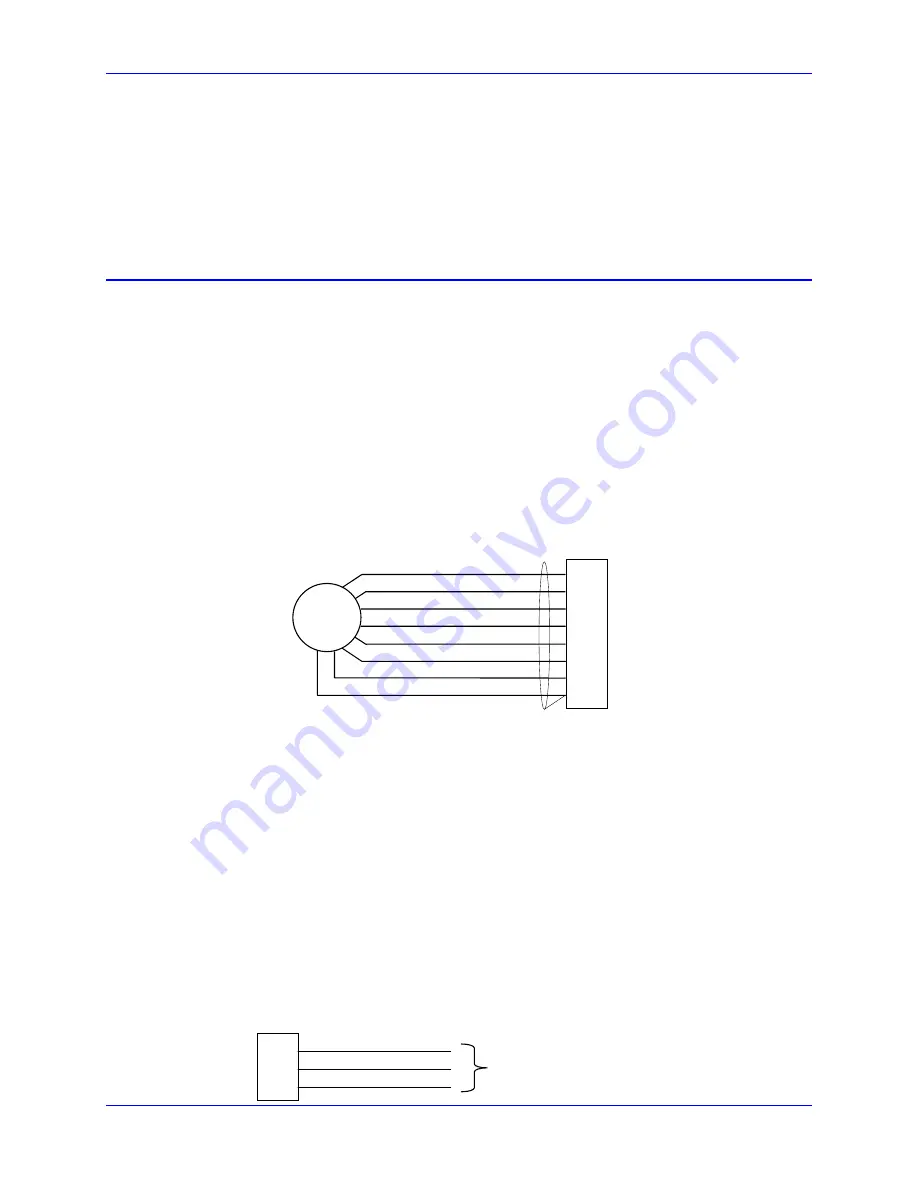
Example:
differential quadrature encoder connected to channel #1:
DAC Output signals
If PMAC is not performing the commutation for the motor, only one analog output channel is required to
command the motor. This output channel can be either single-ended or differential, depending on what
the amplifier is expecting. For a single-ended command using PMAC channel 1, connect DAC1+ (pin
29) to the command input on the amplifier. Connect the amplifier's command signal return line to
PMAC's GND line (pin 48).
In this setup, leave the
DAC1-
pin floating; do not ground it.
For a differential command using PMAC channel 1, connect DAC1 (pin 29) to the plus-command input
on the amplifier. Connect DAC1- (pin 31) to the minus-command input on the amplifier. PMAC's GND
should still be connected to the amplifier common.
If you need to limit the range of each signal to ±5V, you will do so with parameter Ix69. Any analog
output not used for dedicated servo purposes may be utilized as a general-purpose analog output. Usually
this is done by defining an M-variable to the digital-to-analog-converter register (suggested M-variable
definitions M102, M202, etc.), then writing values to the M-variable. The analog outputs are intended to
drive high-impedance inputs with no significant current draw. The 220
Ω
output resistors will keep the
current draw lower than 50 mA in all cases and prevent damage to the output circuitry, but any current
draw above 10 mA can result in noticeable signal distortion.
Example:
JMACH1
13
15
9
11
5
7
1
3
A
B
C
5V
JMACH1
29
31
48
DAC1+
DAC1-
GND
Connect to the amplifier
±10 Volts command input
Summary of Contents for PMAC2A-PC/104
Page 2: ......
Page 14: ...PMAC2A PC 104 Base Board Hardware Setup 8 ...
Page 34: ...PMAC2A PC 104 PMAC2A PC 104 Software Setup 28 ...
Page 41: ...PMAC2A PC 104 ACC 1P Hardware Reference Summary 35 ...
Page 51: ...PMAC2A PC 104 Base Board E Point Jumper Descriptions 45 ...
Page 55: ...PMAC2A PC 104 Acc 1P E Point Jumper Descriptions 49 ...







































































