















Geo Brick Drive User Manual
Appendix D
293
Maximum “Actual” Open-Loop Velocity
In open-loop mode, the actual velocity register is limited by the Encoder Conversion Table to 24 bits.
Furthermore, it requires two samples (servo cycles) to compute the velocity. Therefore, the maximum
value which the actual velocity register can withhold is:
When performing an open-loop move/test with higher resolution serial encoders, care must be taken not
to exceed this threshold. You will see saturation plateau lines in the position data if it is plotted during the
move. At this point, re-establishing an absolute position read (using custom plc, or automatic settings) is
necessary to avoid fatal following errors in closed loop and or to be able to perform proper motor phasing.
Example:
Take a 37-bit absolute serial rotary encoder (25-bit single turn, 12-bit multi-turn) and its
equivalent linear scale (e.g.10 nm resolution), and compare for two different clock settings:
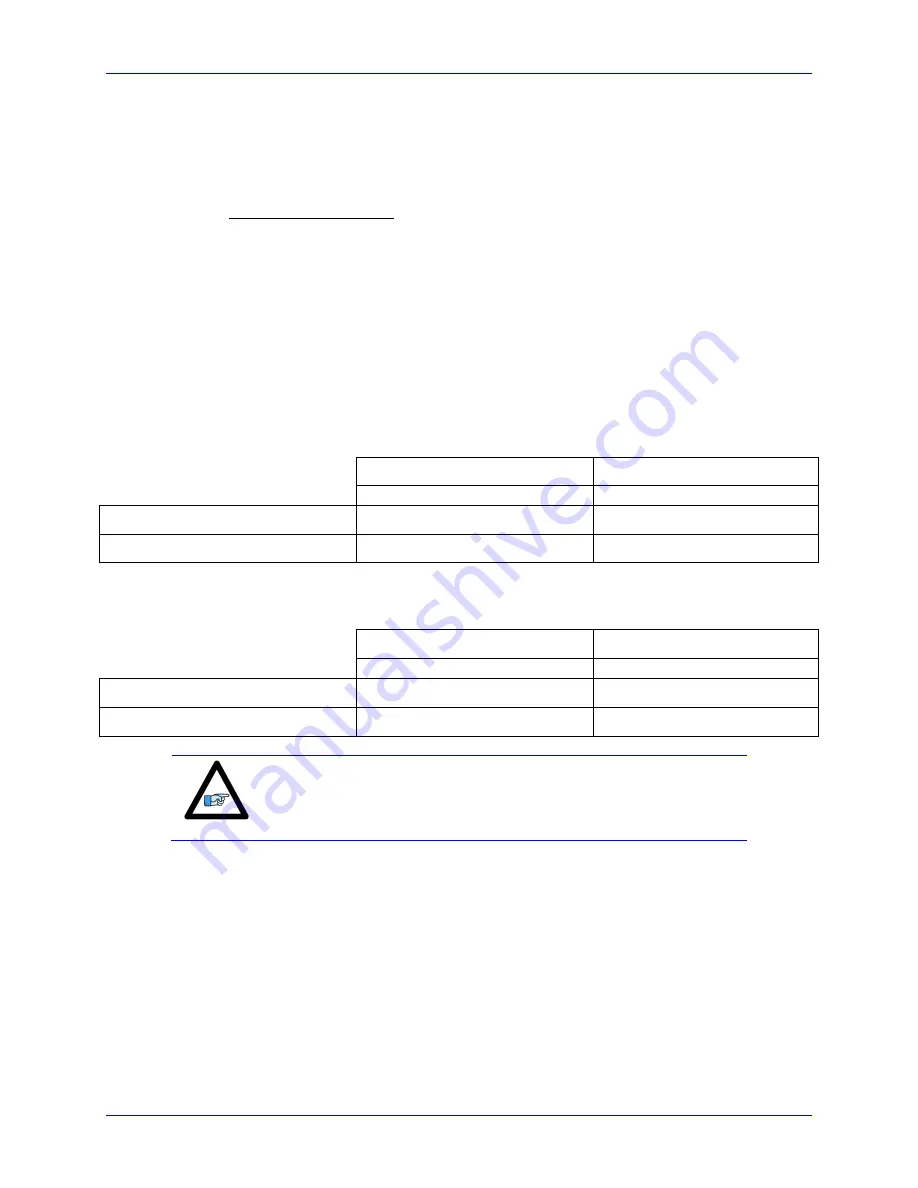
With the default servo clock of
2.258 KHz
, the maximum actual open-loop velocity is
MaxActVel=2
18
*2.258= 591,921 [counts/msec] yielding:
Rotary [rpm]
Linear [mm/sec]
=MaxActVel*60000/SF
=MaxActVel*1000/SF
Technique 1/3 (5-bit shift)
1,058
5,919
Technique 2 (no shift)
33,870
189,414
With a servo clock setting of
4.500 KHz
, the maximum actual open-loop velocity is
MaxActVel=2
18
*4.500= 1,179,648 [counts/msec] yielding:
Rotary [rpm]
Linear [mm/sec]
=MaxActVel*60000/SF
=MaxActVel*1000/SF
Technique 1/3 (5-bit shift)
2,109
11,796
Technique 2 (no shift)
67,500
377,487
Note
The maximum actual velocity attainable is directly proportional to the
servo clock frequency. The faster the servo update, the higher is the
actual velocity threshold.
Summary of Contents for Geo Brick
Page 5: ...4...
Page 288: ...Geo Brick Drive User Manual Appendix A 288 Limits Flags J4...





















































