

























RoboClaw Series
Brushed DC Motor Controllers
RoboClaw Series User Manual
90
BASICMICRO
Advanced Motor Control
Advanced Motor Control Commands
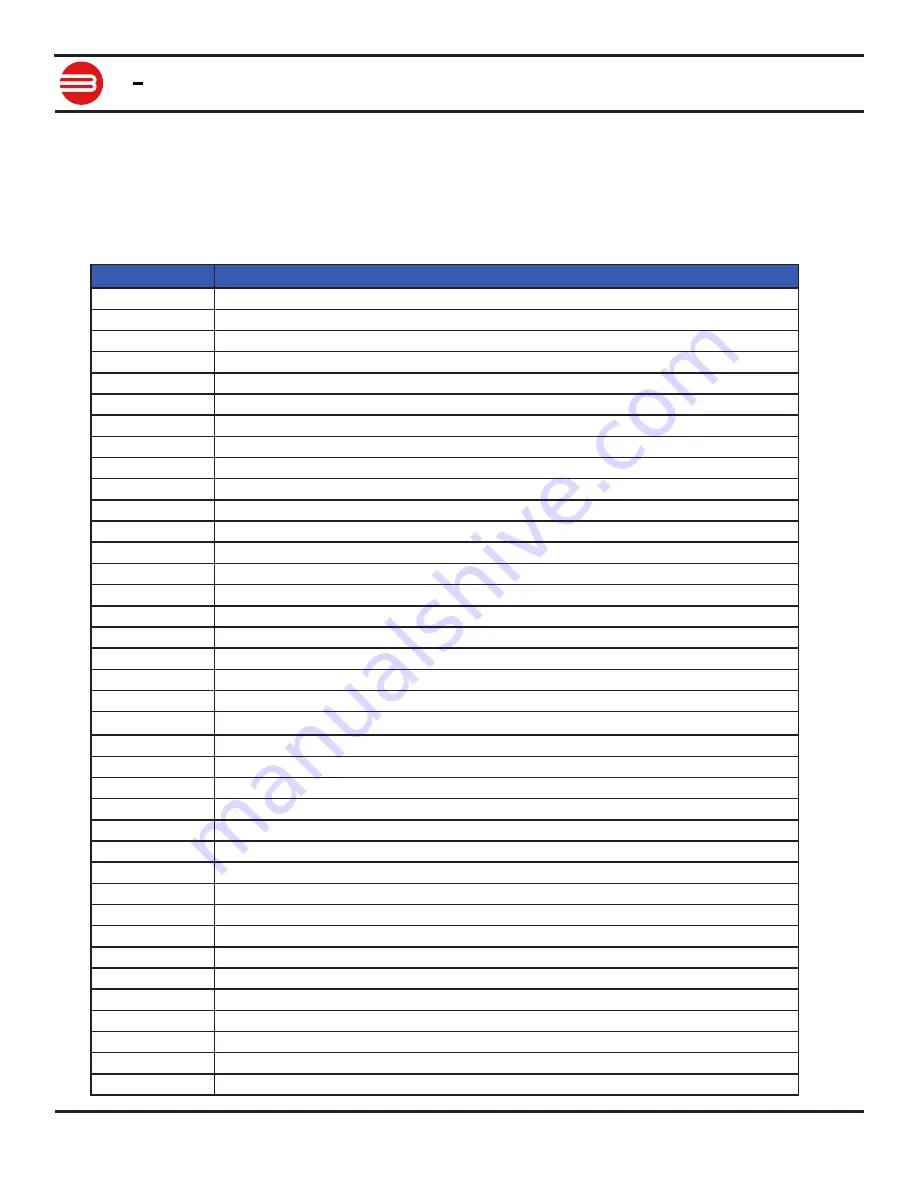
The following commands are used to control motor speeds, acceleration distance and position
using encoders. The PID can also be manually adjusted using Advanced Motor Control
Commands.
Command
Description
28
Set Velocity PID Constants for M1.
29
Set Velocity PID Constants for M2.
32
Drive M1 With Signed Duty Cycle. (Encoders not required)
33
Drive M2 With Signed Duty Cycle. (Encoders not required)
34
Drive M1 / M2 With Signed Duty Cycle. (Encoders not required)
35
Drive M1 With Signed Speed.
36
Drive M2 With Signed Speed.
37
Drive M1 / M2 With Signed Speed.
38
Drive M1 With Signed Speed And Acceleration.
39
Drive M2 With Signed Speed And Acceleration.
40
Drive M1 / M2 With Signed Speed And Acceleration.
41
Drive M1 With Signed Speed And Distance. Buffered.
42
Drive M2 With Signed Speed And Distance. Buffered.
43
Drive M1 / M2 With Signed Speed And Distance. Buffered.
44
Drive M1 With Signed Speed, Acceleration and Distance. Buffered.
45
Drive M2 With Signed Speed, Acceleration and Distance. Buffered.
46
Drive M1 / M2 With Signed Speed, Acceleration And Distance. Buffered.
47
Read Buffer Length.
50
Drive M1 / M2 With Individual Signed Speed and Acceleration
51
Drive M1 / M2 With Individual Signed Speed, Accel and Distance
52
Drive M1 With Signed Duty and Accel. (Encoders not required)
53
Drive M2 With Signed Duty and Accel. (Encoders not required)
54
Drive M1 / M2 With Signed Duty and Accel. (Encoders not required)
55
Read Motor 1 Velocity PID Constants
56
Read Motor 2 Velocity PID Constants
61
Set Position PID Constants for M1.
62
Set Position PID Constants for M2
63
Read Motor 1 Position PID Constants
64
Read Motor 2 Position PID Constants
65
Drive M1 with Speed, Accel, Deccel and Position
66
Drive M2 with Speed, Accel, Deccel and Position
67
Drive M1 / M2 with Speed, Accel, Deccel and Position
119
Drive M1 with Position.
120
Drive M2 with Position.
121
Drive M1/M2 with Position.
122
Drive M1 with Speed and Position.
123
Drive M2 with Speed and Position.
124
Drive M1/M2 with Speed and Postion.







































































