






















NETWORK DATA FORMATS
ADVANCED MICRO CONTROLS INC.
7
54
Configuration Mode (continued)
Configuration Word Format (Word 1) (continued)
Bit 2:
Input 3 Active Level Bit –
Determines the active state of Input 3. Set to “0” if your sensor has Nor-
mally Closed (NC) contacts and the input is active when there is no current flow through it. Set to
“1” if your sensor has Normally Open (NO) contacts and current flows through the input when it is
active.
Bit 1:
Input 2 Active Level Bit –
Determines the active state of Input 2. Set to “0” if your sensor has Nor-
mally Closed (NC) contacts and the input is active when there is no current flow through it. Set to
“1” if your sensor has Normally Open (NO) contacts and current flows through the input when it is
active.
Bit 0:
Input 1 Active Level Bit –
Determines the active state of Input 1. Set to “0” if your sensor has Nor-
mally Closed (NC) contacts and the input is active when there is no current flow through it. Set to
“1” if your sensor has Normally Open (NO) contacts and current flows through the input when it is
active.
Notes on Other Configuration Words
h
Information on the
used when programming the Starting Speed can be found on
page 51.
h
settings for all AMCI motors can be found on page 25.
Network Input Data (Configuration Mode)
The correct format for the Network Output Data when the SD17060E is in Configuration Mode is shown
below.
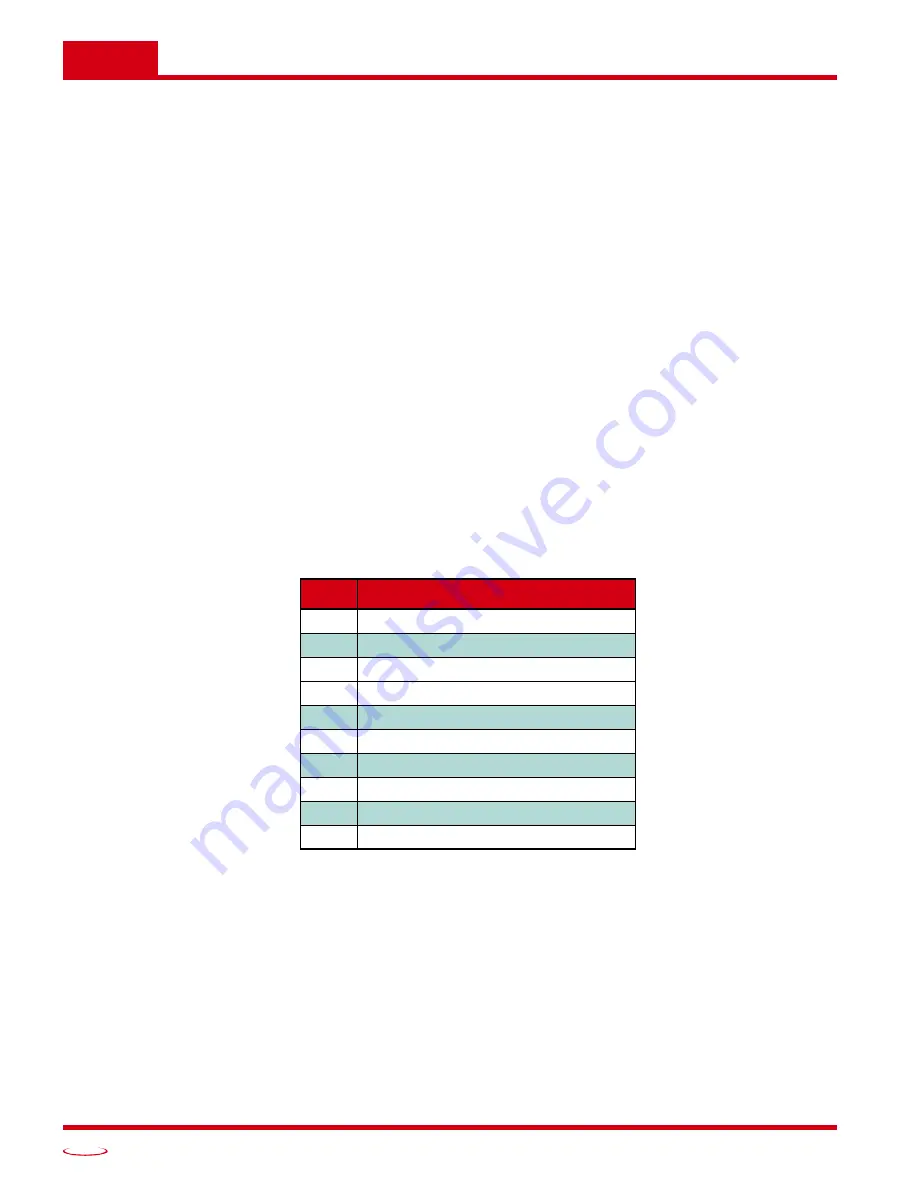
Table 7.4 Network Input Data Format: Configuration Mode
Control Word Format (Word 0)
When the Configuration data is valid and accepted, this word mirrors the value of the Control Word written to
the SD17060E. When the SD17060E is not configured, or the data written to it is invalid, then this word has
the same format of Status Word 1 when the SD17060E is in Command Mode. This format is explained in the
section starting on page 59. On power up, the value of this word will be 6408h.
Word
Configuration Data
0
Control Word
1
Mirror of Output Data Config Word
2
Mirror of Starting Speed: Upper Word
3
Mirror of Starting Speed: Lower Word
4
Mirror of Motor Steps/Turn
5
0000h
6
Mirror of Encoder Pulses/Turn
7
Mirror of Idle Current Percentage
8
Mirror of Motor Current (X10)
9
Mirror of Current Loop Gain







































































