





























5 Operation
75 SD780 Series Servo Technical Manual
reversed
A/B pulse phase sequence logic when setting forward/reverse:
0-
Don’t revert the pulse output: When forward, A leads B.
1-
1- Revert the pulse output: When forward, B leads A .
1.
Frequency division pulse
The number of pulses per revolution from the encoder is processed inside the servo pack and then
divided down and output to the set value of Pn070.
The encoder's number of divided pulse outputs is set according to the system specifications of the
machine and the host device.
The setting of frequency division pulse number of encoder will be limited by the resolution of
encoder. The maximum output frequency of frequency division pulse of encoder shall not exceed
4MHz (after 4 times frequency), as shown in the table below:
Pulse Number of Encoder
Frequency Devision
(pulse/r)
Setting
increment
Encoder Resolution
Upper Limit of motor
Speed ( r/min)
17 bits 20 bits 23 bits
16
~
16384
1
o
o
o
6000
16386
~
32768
2
o
o
o
3000
32772
~
65536
4
o
o
o
1500
65544
~
131072
8
o
o
o
750
131088
~
262144
16
-
o
o
375
262176
~
524288
32
-
o
o
187
524352
~
1048576
64
-
o
o
93
1048704
~
2097152
128
-
-
o
46
2097408
~
4194304
256
-
-
o
23
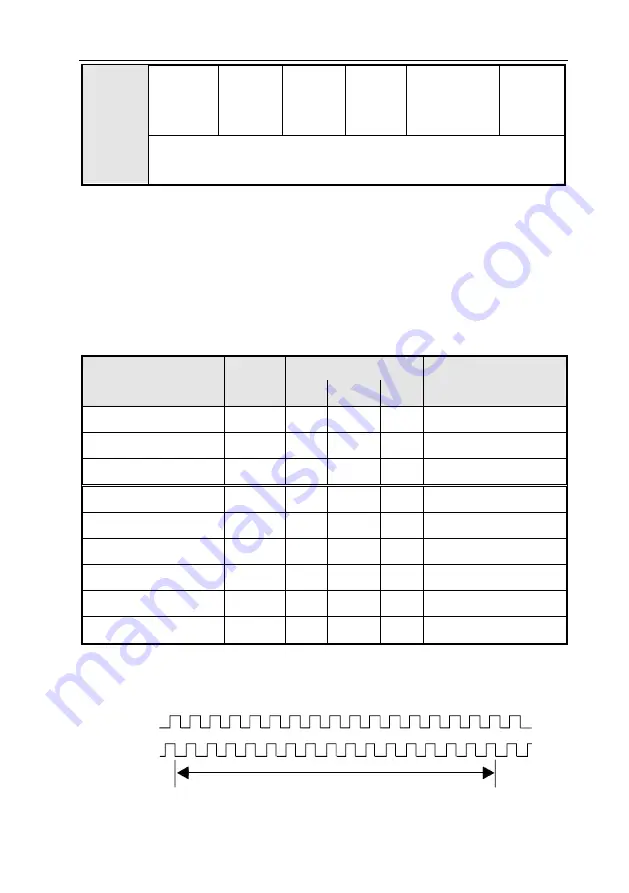
Output example: When Pn070=16 (16 pulses per revolution), an example of the output of the
encoder-divided pulse output A-phase (PAO) signal and the encoder-divided pulse output B-phase
(PBO) signal is shown below.
1
Resolution Pn070=16
PAO
PBO
1 Resolution Pn070=16