




























Page 30
M4220161122CN
UI Robot Technology Co. Ltd.
UIROBOT SCARA Robot
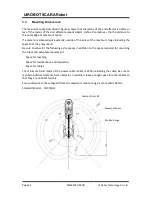
5.1.3
Max. Pulse Range of Joint #3
The 0 pulse position of Joint #3 is the position where the shaft is at its upper limit. The pulse
value is always negative because Joint #3 always moves lower than the 0 pulse position.
Joint #3 Stroke
Lower Limit Pulse
SR 4150LS
150mm
±
25000 pulse
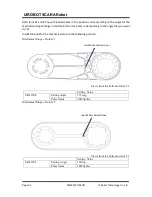
5.1.4
Max. Pulse Range of Joint #4
The 0 pulse position of Joint #4 is the position where the flat near the end of the shaft faces
towards the end of the Arm #2. With the 0 pulse as a starting point, the anticlockwise pulse
value is defined as the po) and the clockwise pulse value is defined as the negative(-).
+Y + anticlockwise
SR XXX0L:+X 0 pulse
±
4000 pulse
-clockwise
0 Pulse





















































