




























UM-25
Cobot Transfer Unit
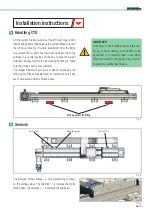
The first instruction is “Do Homing”.
This instruction does the homing,
so the carriage will move to the side
where the motor is installed.
It is necessary to “Do Homing” at least
once when turning the system on, in
order to reference the positioning of
the motor. We suggest inserting this
function in the “Before Start” method.
Do homing
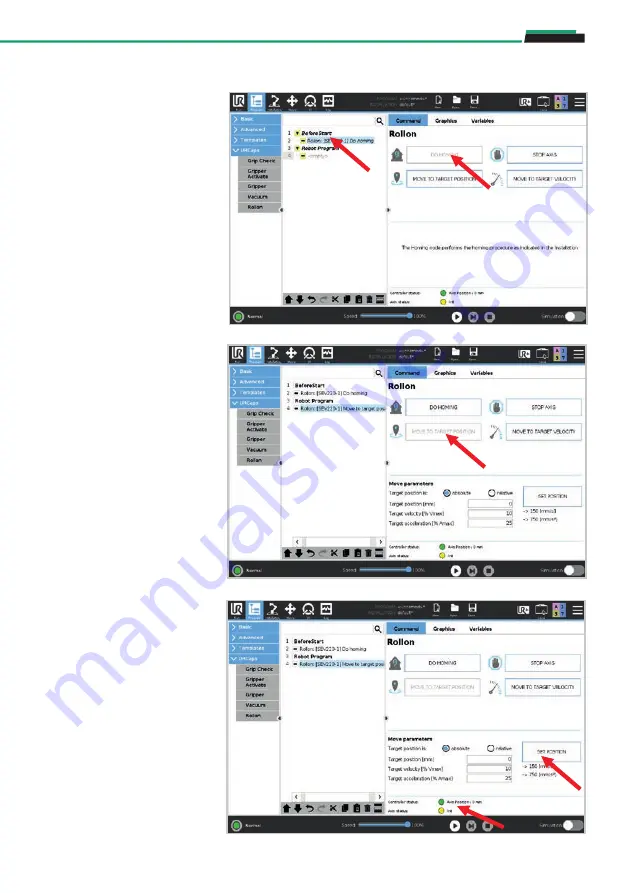
The second instruction is “Move to
target position”. You can choose if the
target position (configurable) is abso-
lute, based on the homing, or relative.
Also, velocity and acceleration are
configurable values:
- Velocity is expressed in percentage of
max allowable velocity (beside you can
see the resulting velocity in mm/s).
- Acceleration is expressed in percent-
age of max allowable acceleration
(beside you can see the resulting
acceleration in mm/s
2
).
Move to target position
Fig. 43
Fig. 44
The button “Set Position” sets the cur-
rent position of the axis: you can manu-
ally move the axis in the de sired position
using the “UR+” menu tab, and then
save it in the target position.
The two leds indicate YOUdrive status
and Axis Status. “Axis po sition” indicates
the current position of the axis.
Fig. 45
Содержание ROLLON CTU 220-1I
Страница 2: ......
Страница 44: ...UM 42 Notes Notes...
Страница 45: ...UM 43 Cobot Transfer Unit Notes...
Страница 46: ...UM 44 Notes Notes...
Страница 47: ......