





























DocID13284 Rev 2
427/564
UM0404
CAN modules
Status interrupts
A Status Interrupt is generated by bits
BOff
and
EWarn
(Error Interrupt) or by
RxOk
,
TxOk
,
and
LEC
(Status Change Interrupt) assumed that the corresponding enable bits in the CAN
Control Register are set. A change of bit
EPass
or a write to
RxOk
,
TxOk
, or
LEC
will never
generate a Status Interrupt.
Reading the Status Register will clear the Status Interrupt value (8000h) in the Interrupt
Register, if it is pending.
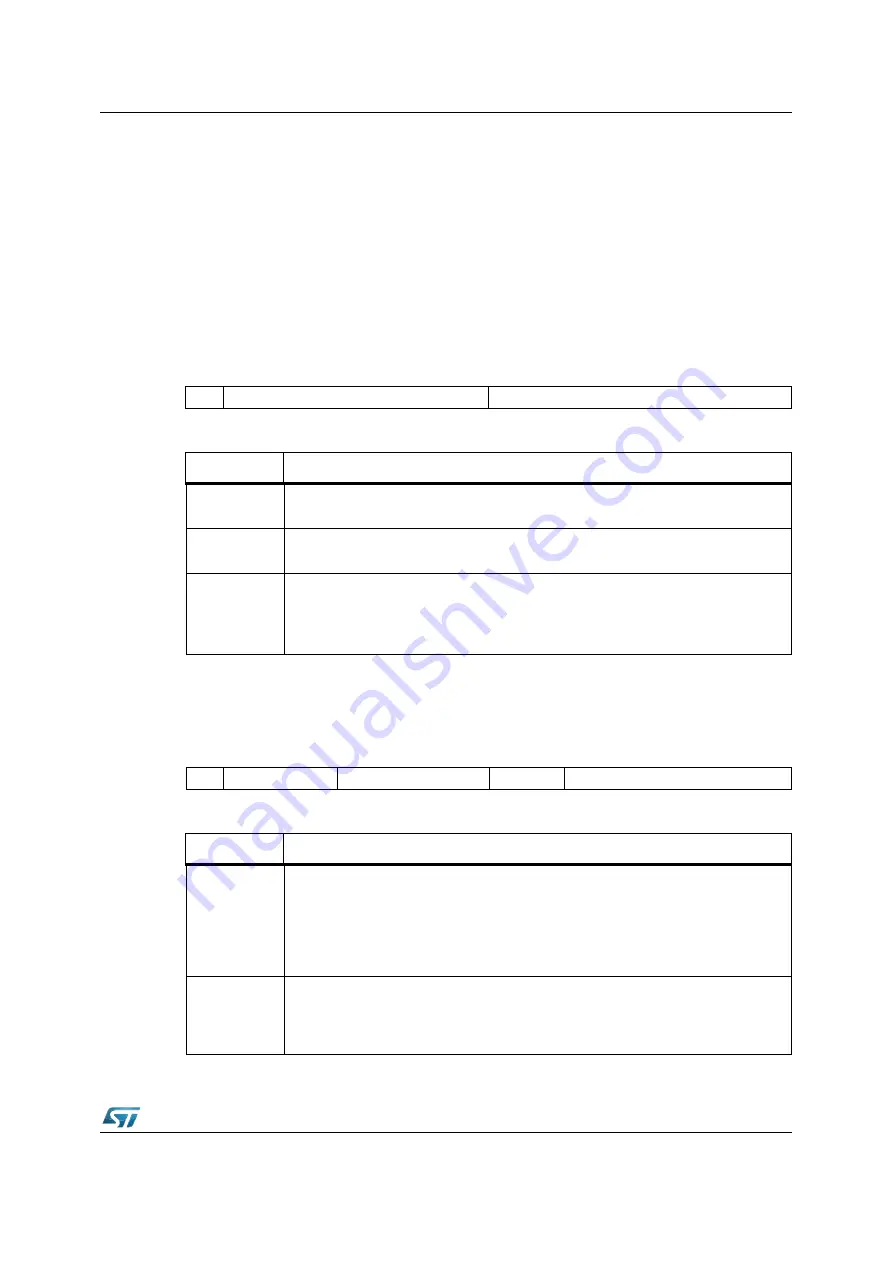
Error counter
CAN1EC (EF04h)
XBUS
Reset Value: 0000h
CAN2EC (EE04h)
XBUS
Reset Value: 0000h
Bit timing register
CAN1BTR (EF06h)
XBUS
Reset Value: 2301h
CAN2BTR (EE06h)
XBUS
Reset Value: 2301h
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
RP
REC(6:0)
TEC(7:0)
R
R
R
Bit
Function
TEC(7:0)
Transmit Error Counter
Actual state of the Transmit Error Counter. Values between 0 and 255.
REC(6:0)
Receive Error Counter
Actual state of the Receive Error Counter. Values between 0 and 127.
RP
Receive Error Passive
’0’: The Receive Error Counter is below the
error passive
level.
’1’: The Receive Error Counter has reached the
error passive
level as defined in the
CAN Specification.
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
-
TSeg2
TSeg1
SJW
BRP
RW
RW
RW
RW
Bit
Function
BRP
Baud Rate Prescaler
Value by which the CPU clock frequency is divided for generating the bit time
quanta. The bit time is built up from a multiple of this quanta. Valid values for the
Baud Rate Prescaler are 01h-3Fh (0…63). The actual interpretation by the
hardware of this value is such that one more than the value programmed here is
used.
SJW
(Re)Synchronization Jump Width
Valid programmed values are 0h-3h (0...3). The actual interpretation by the
hardware of this value is such that one more than the value programmed here is
used.