





























- 23 -
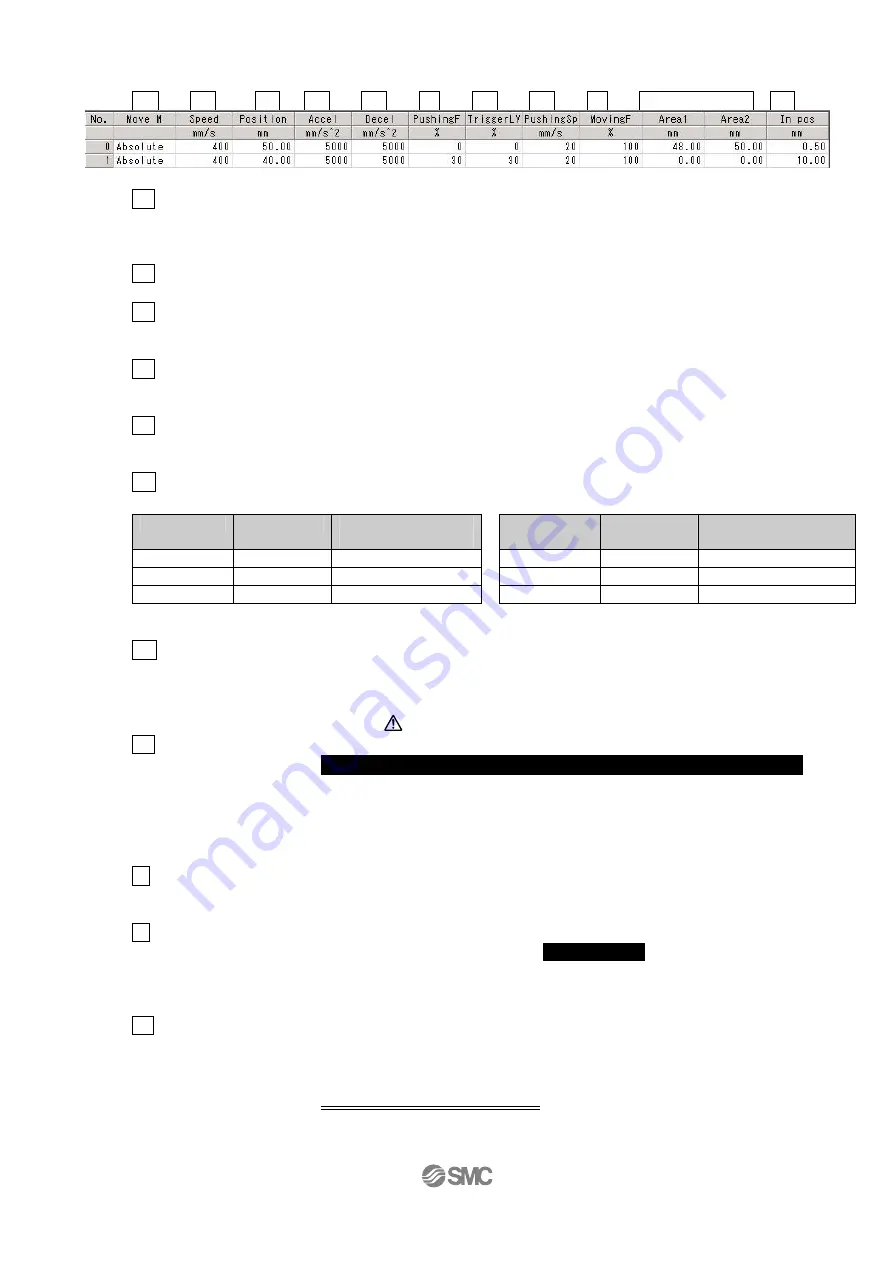
<Items and setting values of pushing operation>
Step no. 1: Pushing operation
a b c d e f g h i j k
[
◎
] Need to be set - [
○
] Need to be adjusted as required -[
×
] Not used. Items don't need to be changed.
a <
◎
Movement MOD > When the absolute position is required, set Absolute
When the relative position is required, set Relative
Absolute: Distance from the origin position. Relative: Feed from the current position
b <
◎
Speed > Transfer speed to the target position
c <
◎
Position > Target position / The pushing starting position is set forward by 0.5mm or
more of the pushing
object.
d <
○
Acceleration > The parameter which defines how rapidly the actuator reaches the speed set In.
The higher the set value, the faster it reaches the speed set in.
e <
○
Deceleration > The parameter which defines how rapidly the actuator comes to stops.
The higher the set value, the quicker it stops.
F <
◎
Pushing force > Pushing force ratio is defined.
Note) :Step motor - Settable range 30 to 70 %
Note) :Servo motor-Settable range 50 to 100(75) %
Pushing F(%)
Duty ratio (%)
Continuous pushing time
(minute)
Pushing F(%)
Duty ratio (%)
Continuous pushing time
(minute)
30 -
-
50 -
-
50 or less
30
5
75 or less
30
5
70 or less
20
3
100 or less
20
3
e.g. If the pushing force is <50% the pushing time can be 5 minutes and the duty ratio of 30%.
- The pushingF of LESH8RA (servo motor) is up to 75% or less.
g <
◎
Trigger LV > The condition at which INP output signal is turned on. Set it below the
pushing force setting value of the pushing force within the range.
The INP output signal is given when the target force (Trigger LV) is achieved.
The INP output signal is turned on when the generated force exceeds the value.
/ See 6.2
Caution(2) on p.41
h <
◎
Pushing speed > The pushing speed whilst in pushing mode.
【
Minimum speed
~
20 mm /s
】
and
【
Speed or more Pushing Speed
】
(Please do not change)
The speed can be set from
the specified minimum to a maximum of
20mm/s. If the speed is too high, the actuator or work piece can be
damaged by impact.
i <
×
Moving force > The upper force limit for the pushing operation starting position
The force is automatically adjusted corresponding to the load.
j <
○
Area1
,
Area2 > This is the condition that turns on the AREA output signal.
The setting condition should be
Area 1<Area 2
.
It is possible to set at Relative operation.
The position will be Absolute (position from the origin).
k <
◎
In position > The transfer distance (relative value) when pushing
If the transferred distance exceeds the setting, it stops even if it is not pushing.
If the transfer distance is exceeded, the INP output signal will not be turned on.
(incomplete pushing)
Example
)
In case of Step no.1 / Position: 40 + In Position: 10 = 50
(The position where the incomplete pushing is detected.)