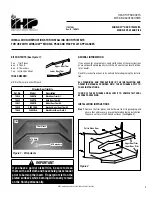
Angle (distance values in mm)
Scan
1
2
3
4
5
6
7
8
9
…
1 Output value
(scan 1-4)
0
0 1155 1230 1190 1130 1450 1370
0
…
5
0
0
0
1110 1150 1150 1380 1380
0
…
2. Output value
(scan 2-5)
0
0 1173 1225 1190 1130 1450 1370
0
6
0
0 1200 1210 1190
0
1500 1500
0
…
3. Output value
(scan 3-6)
0
0 1173 1235 1190 1190 1450 1370
0
7
0
730
1150
0
1200 1200 1450 1450
0
…
4. Output value
(4-7)
0
730 1173 1163 1190 1190 1450 1370
0
…
…
…
…
…
…
…
…
…
…
…
Individual outliers (shown in
bold
in the table) influence the average value.
Once the measured value telegram has been confirmed, the first measured value is not
output until after the configured number of scans. Therefore, there is always a time
delay equivalent to the number of scans configured for averaging. The digit of the first
scan included in the averaging calculation is always output in the scan counter. Invalid
distance values (= 0) are not included in the averaging calculation, so that in these
places a smaller number of scans is used in the division calculation.
Based on a scanning frequency of 15 Hz, a measured value is generated every 67 ms .
The time delay affecting data output results from this base value multiplied by the num‐
ber of averaging operations (e.g., 2 averagings = 134 ms, 10 averagings =670 ms).
3.6.8
Calculation of the field size for mobile applications
In order to prevent collisions between vehicles, and between vehicles and fixed objects,
the switching field must have sufficient length and width.
To calculate the switching field length, you need to take into consideration the stopping
distance of the vehicle. This comprises the following:
•
the braking distance, which can be found in the vehicle documentation
•
the distance covered during the vehicle control’s response time, which can be
found in the vehicle documentation
•
The distance covered during the response time of the LiDAR sensor,
NOTE
•
We recommend adding a supplement of at least 100 mm to the protective field
length in order to stop the vehicle before a possible collision.
•
If retro-reflectors are situated in the path of the vehicles, or if you anticipate that
the braking force of the vehicle will diminish over time, you may, under certain cir‐
cumstances, need to increase the recommended supplement.
•
The width of the switching field should cover the vehicle width. You should also
configure a supplement of at least 100 mm on every side.
Height of the scan plane
The recommended mounting height for mobile applications is at least 150 mm.
PRODUCT DESCRIPTION
3
8024231//2019-03-29 | SICK
O P E R A T I N G I N S T R U C T I O N S | TiM781
21
Subject to change without notice