
























9. Troubleshooting
9.1. Palletizing Solution (except the AirPick Gripper)
Problem
Potential Solution
Robot entered in protective stop after few layers.
l
Make sure to enter a box height that is high enough to compensate
box variability. You may have to enter a box height that is slightly big-
ger than your real box dimensions. A small error can accumulate and
appear only after many layers.
Robot starts dropping box from a height that gradually
increase with each layer.
l
Make sure to enter a box height that is not too big. Try to reduce it. A
small error can accumulate and appear only after many layers.
Robot entered in collision with a box already placed on
the pallet.
l
Make sure to enter a box height that is not too small.
l
Make sure you entered box width and length that are not too
short. If your box has rounded sides, you need to compensate by
entering a slightly bigger box width and/ or length.
l
Make sure you have started your program with the pallet viewer
representing your current situation.
Robot triggers a protective stop when placing a box on
the first layer.
l
Verify the box height dimension. You may have to compensate for
a convex box.
l
Verify pallet height.
l
Verify that your TCP height is properly set.
A box has dropped on the pallet from a high height.
l
Validate that the TCP is located over the box at the grip position.
l
Validate the height of the pallet in the pallet configuration menu.
Boxes are not always placed straight on the pallet.
l
Make sure your conveyor stop rig always places the box at the same
place every time. You need to have a stable box position to ensure a
reliable box positioning.
l
Make sure the " Grip position" you have set makes the Vacuum Grip-
per is centered and parallel to the box.
A collision has been detected during the trajectory.
l
Make sure the pallet viewer corresponds to reality.
l
Move the gripper away from the robot and the linear axis
Palletizing Solution - Instruction Manual
87
Содержание PALLETIZING SOLUTION
Страница 12: ...Palletizing Solution Instruction Manual 12...
Страница 72: ...6 1 2 AirPick Vacuum Gripper Fig 6 1 AirPick general dimensions 72...
Страница 73: ...Palletizing Solution Instruction Manual 6 1 3 Extra Reach Bracket 73...
Страница 74: ...6 1 4 Bracket for two 2 Suction Cups Fig 6 2 Two air nodes bracket s dimensions 74...
Страница 80: ...80...
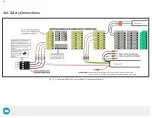
Страница 95: ...1 2 2 Safety Connections Fig 12 2 Universal Robots Controller Safety Connections Schema 95...

































































