





























Tip
You can toggle at any time between the Line to waypoint and Curve to waypoint options.
Select the waypoint in the program tree and tap the appropriate radio button in the Command tab.
Repeat step 2 until you complete your Multipoint Path.
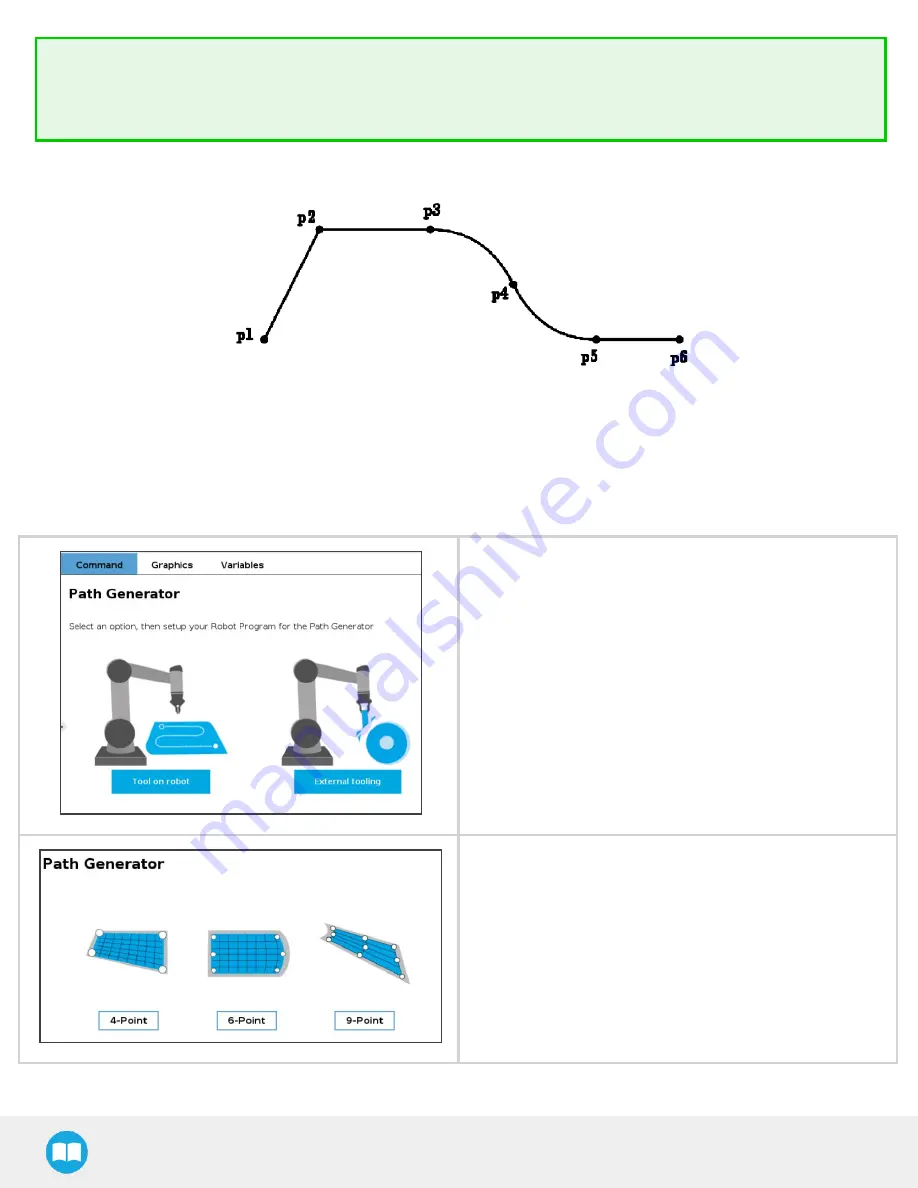
Fig. 4-16: Representation of a six-waypoint Multipoint Path with both curves and straight lines.
4.10. Path Generator node
The Path Generator node allows you to program and edit complex trajectory in a matter of minutes. You can put the Path
Generator node within a Force Control node to make sure your robot applies a constant force along the process.
l
To add a Path Generator node, open the URCaps menu
from your program.
1. Choose Path Generator.
2. On the command tab, select the Tool on robot or
the External Tooling option.
Tool on robot option:
l
Check the
Path relative to a feature
box to choose between
the Actual pose of the robot or go configure a Feature point
in Installation tab
→
Features
→
Point.
l
Select the required path depending on your surface :
o
4-point: for a surface between two lines
o
6-point: for a surface between two arcs
o
9-point : for a surface between four arcs
l
Follow the steps bellow.
53