





























Document Version V1.1.0(01/11/2023) 55
Figure 5-20 Installation of slave arm
5.5
Installation of rotating shaft (for 4-axis robot)
Auxiliary tool: a 2.5 mm Allen wrench.
Step 1
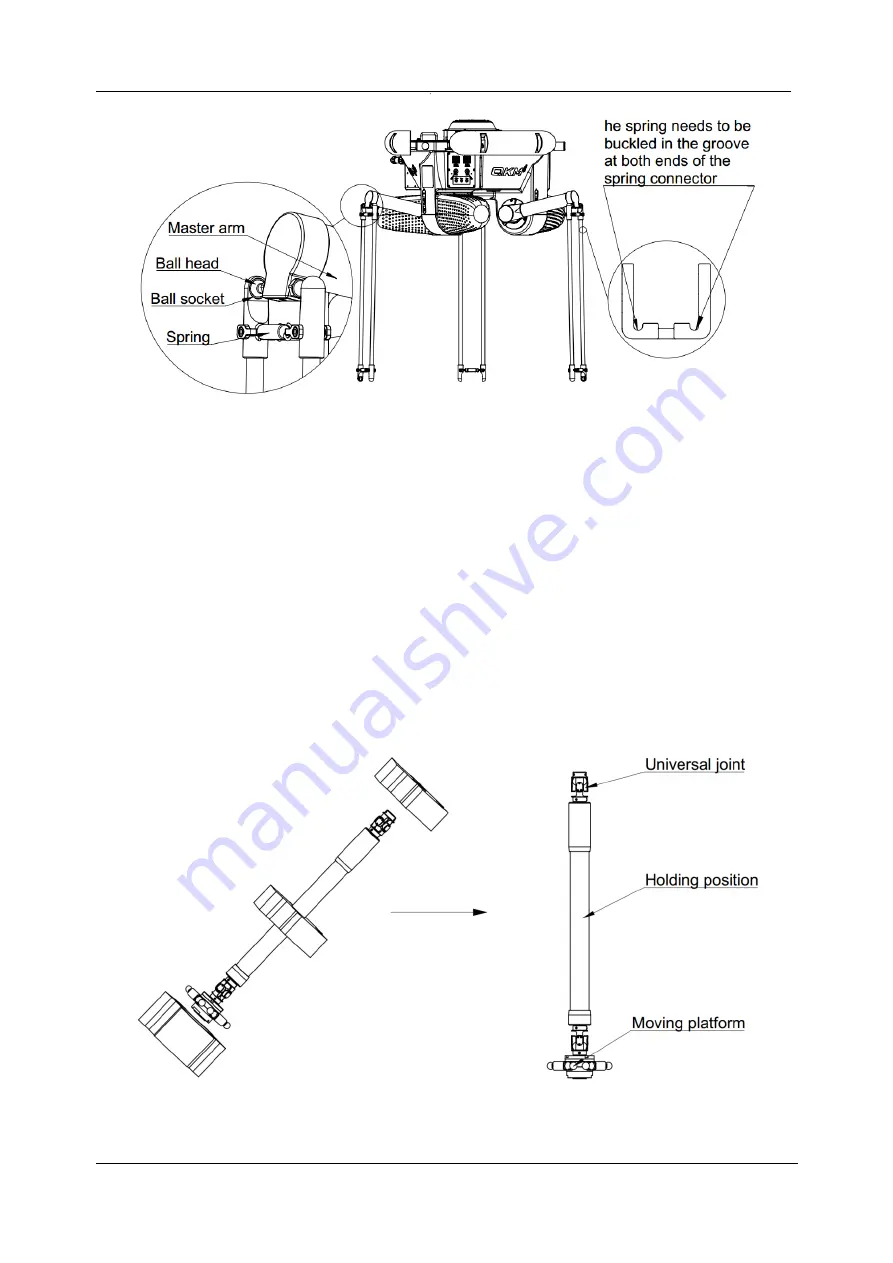
Remove the packing foam from the rotating shaft and hold the carbon
fiber tube in the middle of the rotating shaft to naturally sag the moving
platform as shown in Figure 5-21.
Figure 5-21 Rotating shaft
Содержание AP3X
Страница 1: ...is the trademark of QKM Technology Dongguan Co Ltd QKM has been granted ownership of this trademark...
Страница 132: ...AP3X Robot User Manual 110 Document Version V1 1 0 01 11 2023 Figure 7 46 Jog teach Figure 7 47 Teach interface...
Страница 155: ...Appendix A Dimensions of moving platform installation surface Document Version V1 1 0 01 11 2023 133...





































































