





























AP3X Robot User Manual
54 Document Version V1.1.0 (01/11/2023)
Step 3
Remove the slave arms from the packing foam support.
Step 4
Buckle the ball heads of the master arm into the two ball sockets linked
with a single spring and then sag the slave arm naturally. Install the
other two slave arms in this way as shown in Figure 5-20.
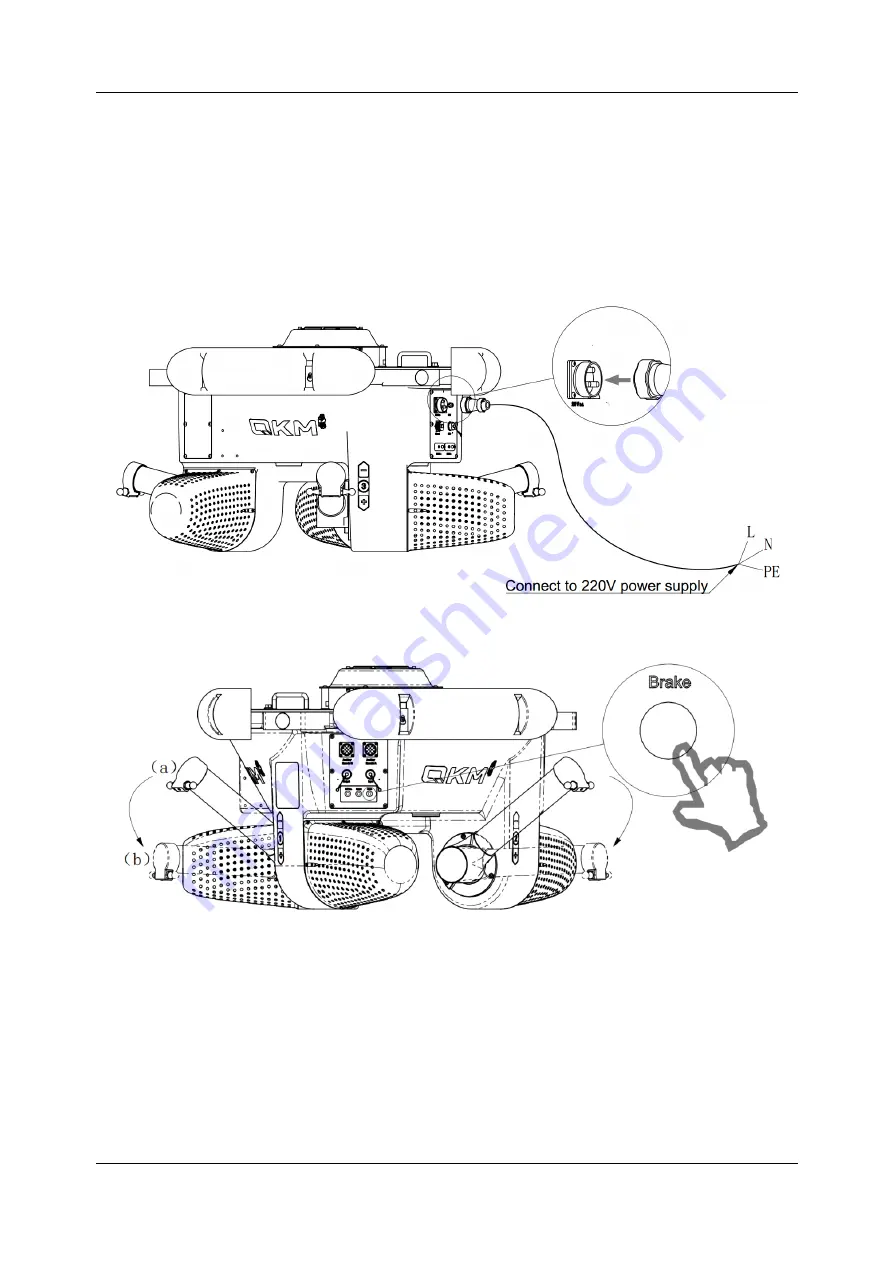
Figure 5-18 Power connection
Figure 5-19 Adjustment of master arm position
Содержание AP3X
Страница 1: ...is the trademark of QKM Technology Dongguan Co Ltd QKM has been granted ownership of this trademark...
Страница 132: ...AP3X Robot User Manual 110 Document Version V1 1 0 01 11 2023 Figure 7 46 Jog teach Figure 7 47 Teach interface...
Страница 155: ...Appendix A Dimensions of moving platform installation surface Document Version V1 1 0 01 11 2023 133...






































































