



























Chapter 2 Standard specifications
9
Ch
ap
ter 2
±5%
;
standard
C
o
n
tr
o
l
sy
st
em
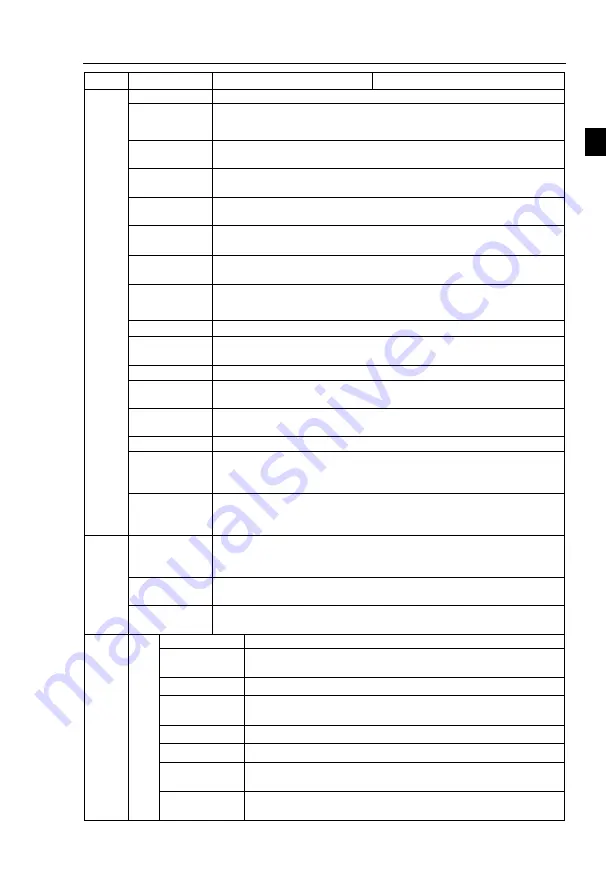
Control system
High performance vector control inverter based on DSP
Control
method
V/F control( for factory debugging use),vector control W/O
PG,vector control W/PG
Acceleration/dec
eleration control
Straight or S-curve mode. Four times available and time range is 0.0
to 6500.0s.
Over load
capability
G type:rated current 150%
-
1min, rated current 180%
-
2s
;
Maximum
frequency
1
、
Vector control
:
0
~
500Hz
;
Carrier
Frequency
2
~
16kHz
;
automatically adjust carrier frequency according to the load
characteristics.
Input frequency
resolution
Digital setting
:
0.01Hz Minimum analog
:
0.01Hz
Start torque
Vector control W/O PG
:
2% rated speed 100% rated torque
Vector control W/PG
:
0Hz/180% rated torque
Speed range
1
:
50( vector control W/O PG)1:1000(vector control W/PG)
Steady-speed
precision
Vector control W/O PG: ≤ ± 0.1% (rated synchronous speed)
Vector control W/ PG: ≤ ± 0.02% (rated synchronous speed)
Torque response ≤ 40ms (vector control W/O PG)
Jogging control
Jog Frequency Range: 0.00Hz to max. frequency;
Jog Ac/deceleration time: 0.0s to 6500.0s
Multi-speed
operation
Achieve up to 16-speed operation through the control terminal
Built-in PID
Easy to realize closed-loop control system for the process control.
Automatic
voltage
regulation(AVR)
Automatically maintain a constant output voltage when the voltage of
electricity grid changes
Torque limit and
control
"Excavator" feature - torque is automatically limited during the
operation to prevent frequent overcurrent trip; the closed-loop vector
mode is used to control torque.
Pe
rs
o
n
a
li
za
ti
o
n
fu
n
ct
io
n
Self-inspection
of peripherals
after power-on
After powering on, peripheral equipment will perform safety testing,
such as ground, short circuit, etc.
Quick current
limiting
The current limiting algorithm is used to reduce the inverter over current
probability, and improve whole unit anti-interference capability.
Timing
control
Timing control function: time setting range(0m to 6500min)
R
u
n
n
in
g
In
p
u
t
si
g
n
al
Running method Keyboard/terminal/communication
Frequency
setting
10 frequency settings available, including adjustable DC(0 to
10V), adjustable DC(0 to 20mA), panel potentiometer, etc.
Start signal
Rotate forward/reverse
Multi-speed
At most 16-speed can be set(run by using the multi-function
terminals or program)
Emergency stop
Interrupt controller output
Wobbulate run
Process control run
Fault reset
When the protection function is active, you can automatically or
manually reset the fault condition.
PID feedback
signal
Including DC(0 to 10V), DC(0 to 20mA)







































































