





























Appendix A – Specifications
69
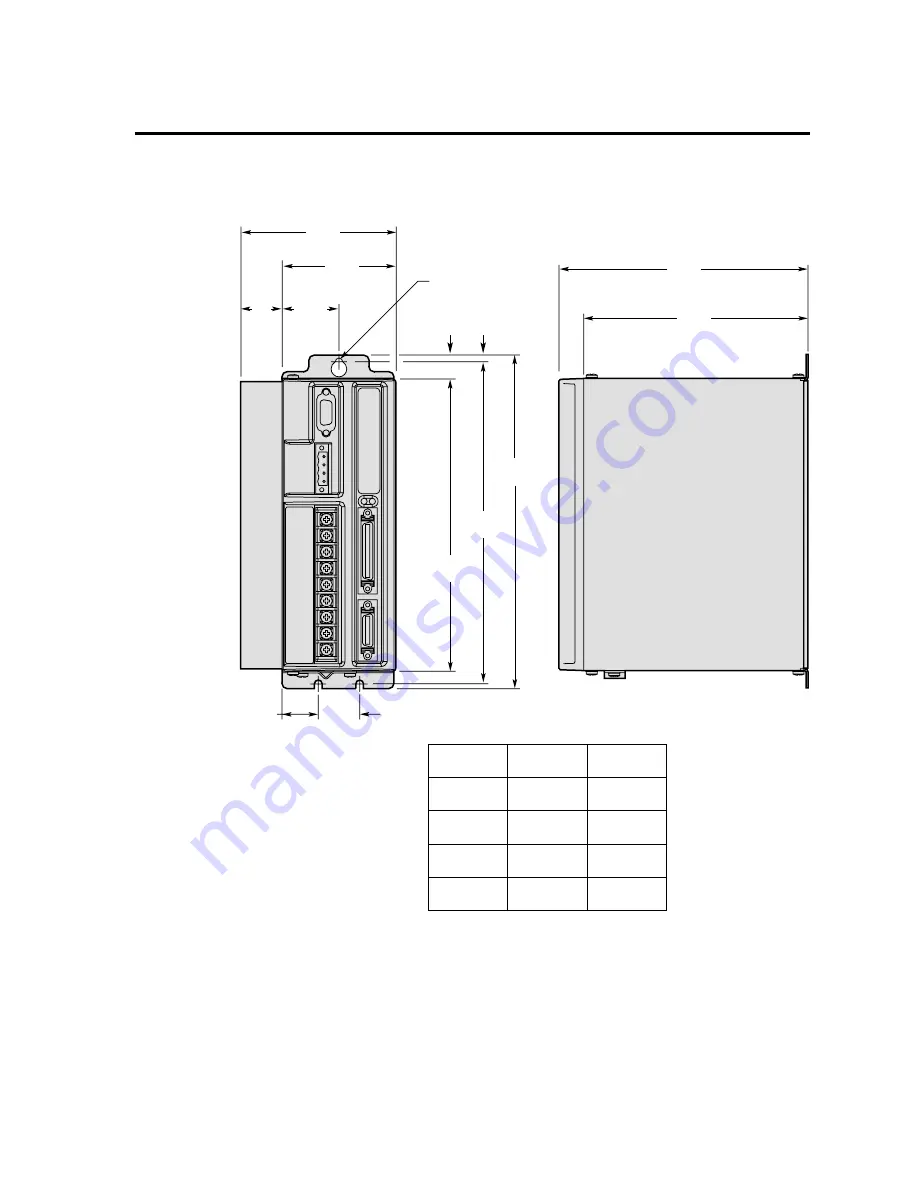
Dimensions
Drive Dimensions
6.00
(153.0)
5.40
(138.0)
3.13 (79.4)
0.38 (9.5)
GV-L3n
3.13 (79.4)
0.38 (9.5)
GV-U3n
3.75 (95.3)
1.00 (25.4)
GV-U6n
3.75 (95.3)
1.00 (25.4)
GV-U12n
OW
2.75
(70)
1.38
(35)
FH
7.0
(177.8)
7.75
(196.9)
8.0
(203.2)
1.00
(25.4 )
0.88
(22.2)
Product
OW
Overall Width
inches (mm)
FH
Fin Height
inches (mm)
3x clearance
for #8 or M4
mounting screws
Dimensions in inches (mm)
0.58
(14.7)
0.16
(4.1)
Dimensions (Shorter Enclosure)
www.comoso.com







































































