


















90
Gemini GV Hardware Installation Guide
System Installation
If you mount the Gemini drive in an enclosure, terminate cable braids (screens) at
the entrance of the enclosure. However, the motor braid must be returned to the
drive’s saddle clamp (GV-H20n/H40n: R-Clamp on front of drive), not any other
location.
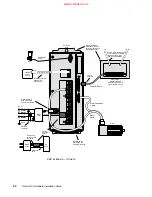
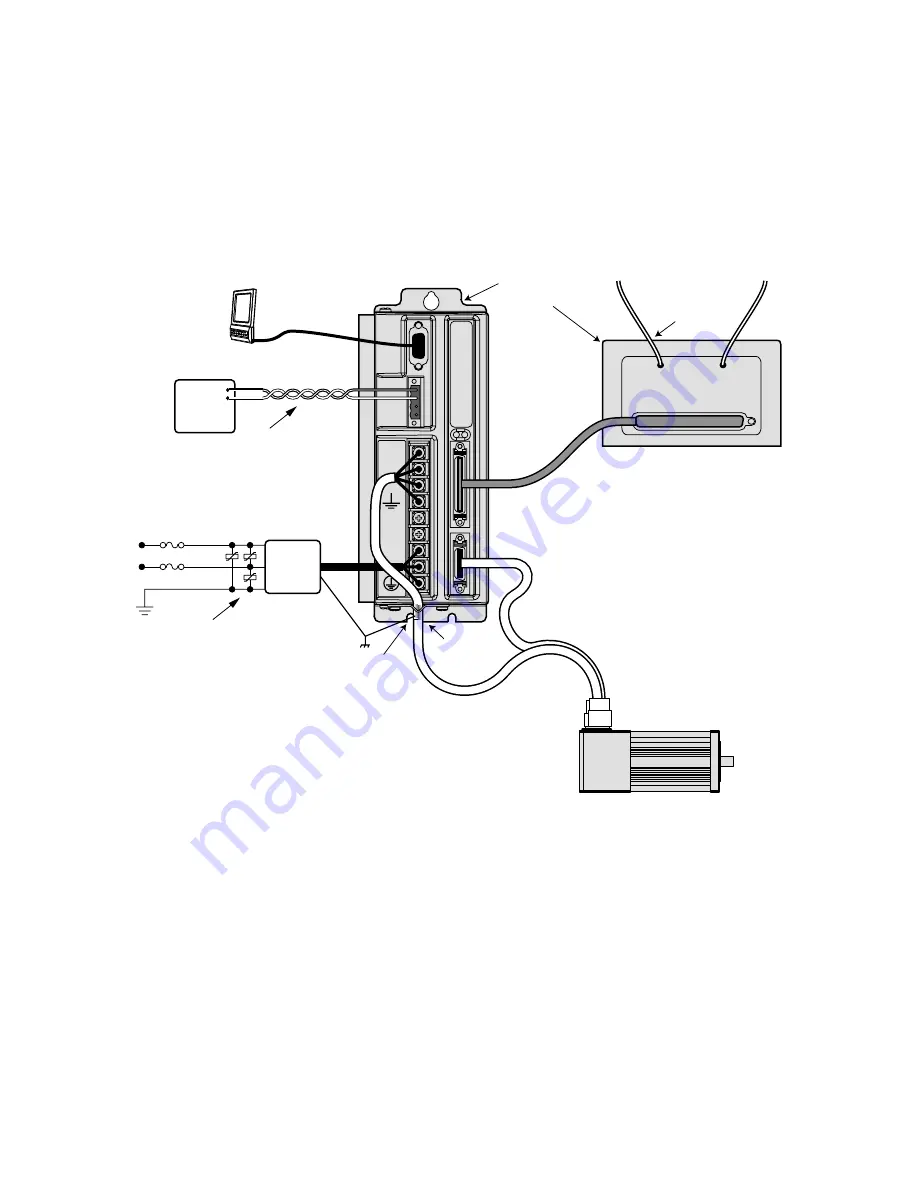
The next figures show typical EMC installations.
Twisted at 3 twists
minimum per
inch (25 mm)
Saddle clamp
braid; make loop
as short as
possible
Varistor
(3 places)
GEM-VM50
Breakout Module
(enclosure mounted, or
not accessible to user)
RS-232/485
Cable
Drive I/O Cable
Motor Feedback
Cable
Motor
Cable
Gemini
Drive
HPC
Motor
N or L2/N
L1
Earth
VAC
VDC+
VDC–
+24VDC
Power
Supply
Mains
Filter
Bond braid to earthed panel.
Use R-clamp or bulkhead
clamshell clamp. (See
360
°
bonding drawing.)
I/O
Limits
Mount to earthed
metal panel. Remove
paint from flange and
mounting locations.
Remove paint
from flange and
mounting locations.
EMC Installation – GV-L3n; GV-U3n/6n/12n
www.comoso.com







































































