


























Figure 28. Fast step response of the Id current controller
8.12 Speed ramp tuning
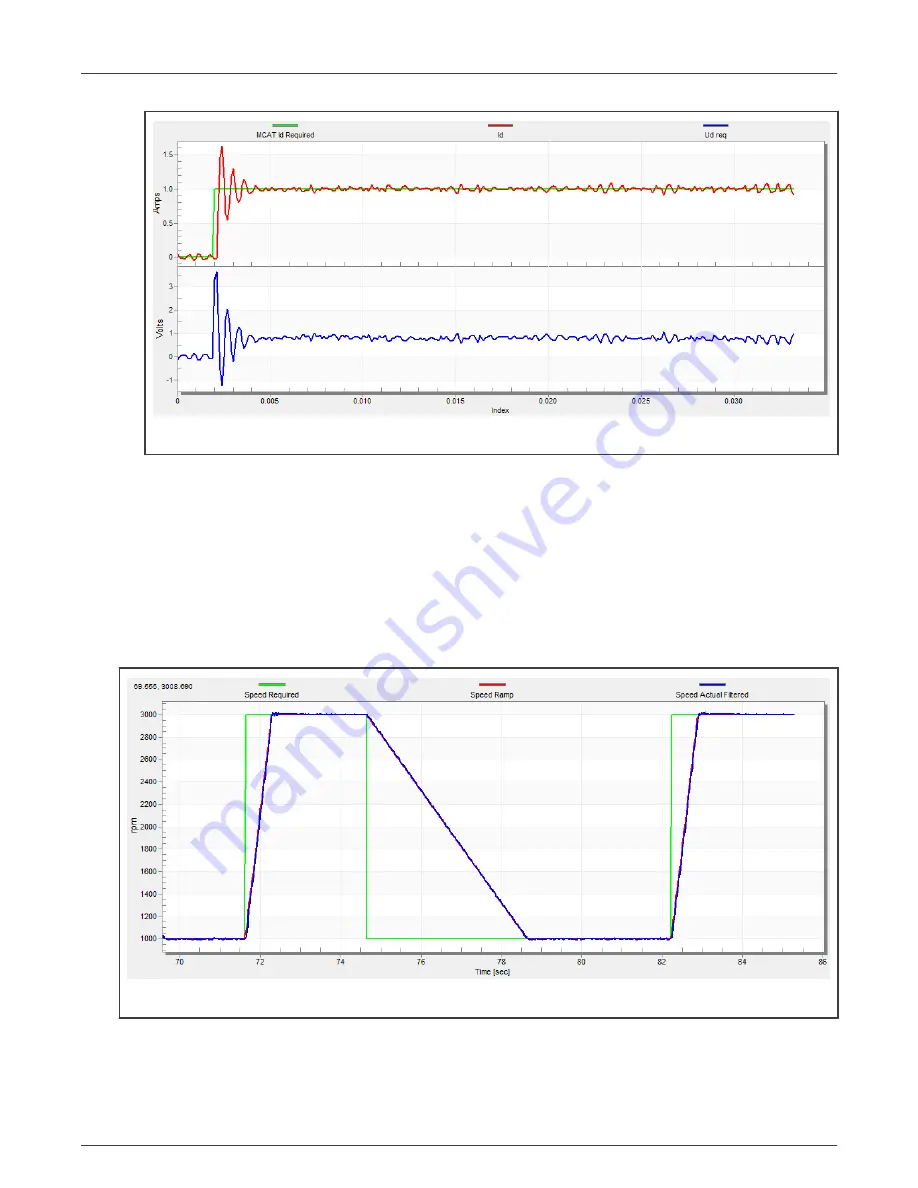
1. The speed command is applied to the speed controller through a speed ramp. The ramp function contains two increments
(up and down) which express the motor acceleration and deceleration per second. If the increments are very high, they can
cause an overcurrent fault during acceleration and an overvoltage fault during deceleration. In the “Speed” scope, you can
see whether the “Speed Actual Filtered” waveform shape equals the “Speed Ramp” profile.
2. The increments are common for the scalar and speed control. The increment fields are in the “Speed loop” tab and
accessible in both tuning modes. Clicking the “Update target” button applies the changes to the MCU. An example speed
profile is shown in
. The ramp increment down is set to 500 rpm/sec and the increment up is set to 3000 rpm/sec.
3. The start-up ramp increment is in the “Sensorless” tab and its value is usually higher than that of the speed loop ramp.
Figure 29. Speed profile
NXP Semiconductors
Remote control using FreeMASTER
MCUXpresso SDK Field-Oriented Control (FOC) of 3-Phase PMSM and BLDC motors, Rev. 0, 01/2022
User Guide
38 / 50







































































