

























8.13 Open loop startup
1. The start-up process can be tuned by a set of parameters located in the “Sensorless” tab. Two of them (ramp increment
and current) are accessible in both tuning modes. The start-up tuning can be processed in all control modes besides the
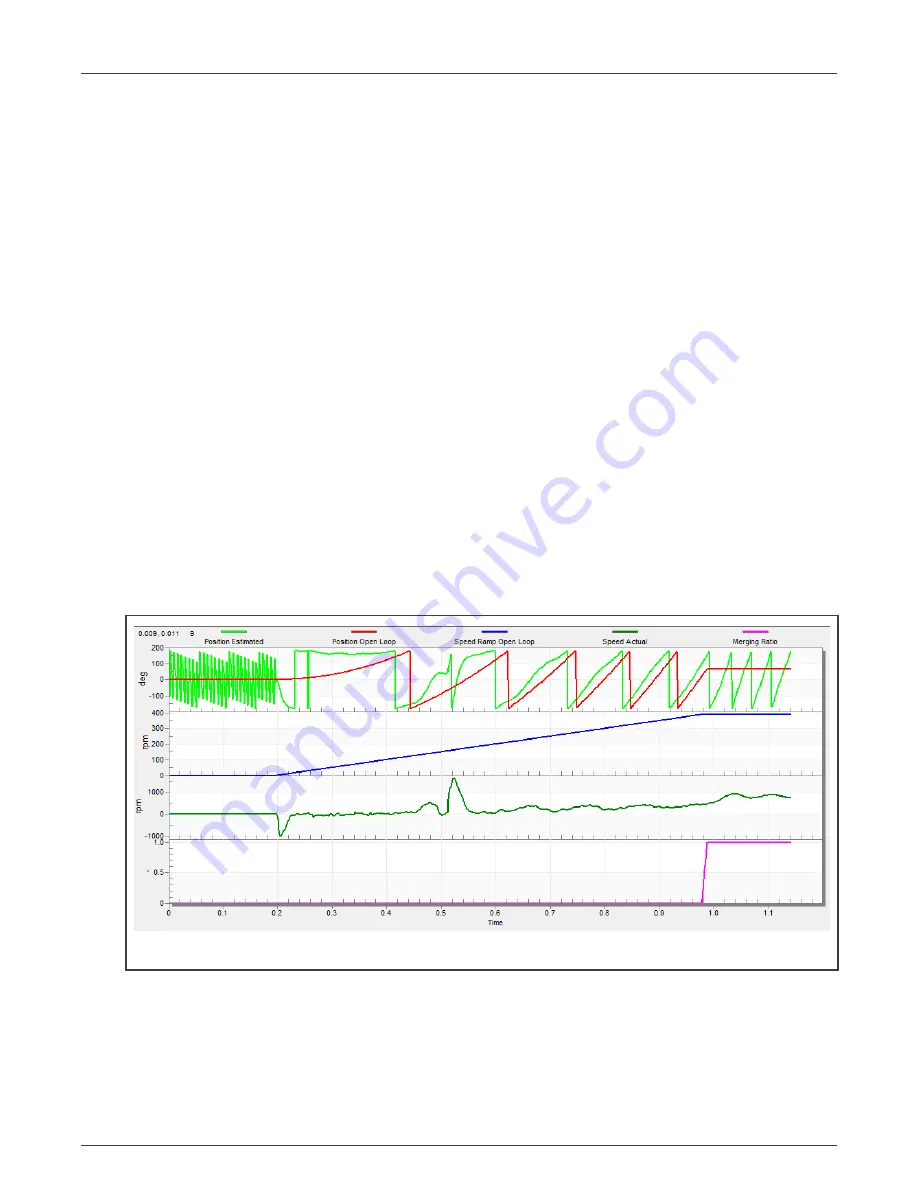
scalar control. Setting the optimal values results in a proper motor startup. An example start-up state of low-dynamic drives
(fans, pumps) is shown in
2. Select the “Startup” recorder from the FreeMASTER project tree.
3. Set the start-up ramp increment typically to a higher value than the speed-loop ramp increment.
4. Set the start-up current according to the required start-up torque. For drives such as fans or pumps, the start-up torque is
not very high and can be set to 15 % of the nominal current.
5. Set the required merging speed—when the open-loop and estimated position merging starts, the threshold is mostly set in
the range of 5 % ~ 10 % of the nominal speed.
6. Set the merging coefficient—in the position merging process duration, 100 % corresponds to a half of an electrical
revolution. The higher the value, the faster the merge. Values close to 1 % are set for the drives where a high start-up torque
and smooth transitions between the open loop and the closed loop are required.
7. Click the “Update Target” button to apply the changes to the MCU.
8. Select “SPEED_FOC” in the "M1 MCAT Control" variable.
9. Set the required speed higher than the merging speed.
10. Check the start-up response in the recorder.
11. Tune the start-up parameters until you achieve an optimal response.
12. If the rotor does not start running, increase the start-up current.
13. If the merging process fails (the rotor is stuck or stopped), decrease the start-up ramp increment, increase the merging
speed, and set the merging coefficient to 5 %.
Figure 30. Motor startup
8.14 BEMF observer tuning
1. The bandwidth and attenuation parameters of the BEMF observer and the tracking observer can be tuned. Navigate to the
"Sensorless" MCAT tab.
2. Set the required bandwidth and attenuation of the BEMF observer—the bandwidth is typically set to a value close to the
current loop bandwidth.
NXP Semiconductors
Remote control using FreeMASTER
MCUXpresso SDK Field-Oriented Control (FOC) of 3-Phase PMSM and BLDC motors, Rev. 0, 01/2022
User Guide
39 / 50