





























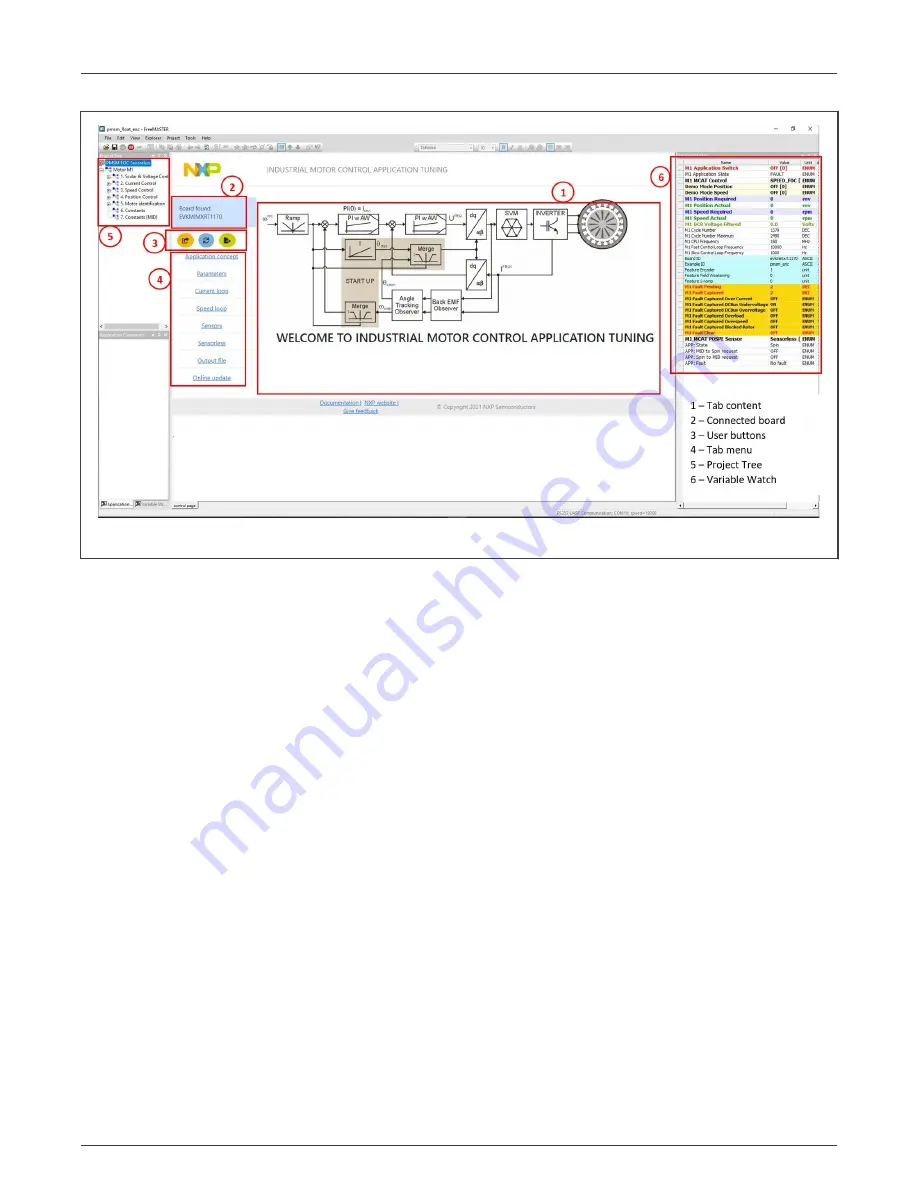
Figure 14. MCAT layout
In the default configuration, the following tabs are available:
• “Application concept”—welcome page with the PMSM sensor/sensorless FOC diagram and a short description of
the application.
• “Parameters”—this page enables you to modify the motor parameters, specification of hardware and application scales,
alignment, and fault limits.
• “Current loop”—current loop PI controller gains and output limits.
• “Speed loop”—this tab contains fields for the specification of the speed controller proportional and integral gains, as well as
the output limits and parameters of the speed ramp. The position proportional controller constant is also set here.
• “Sensors”—this page contains the encoder parameters and position observer parameters. Not available for all devices.
• “Sensorless”—this page enables you to tune the parameters of the BEMF observer, tracking observer, and open-loop startup.
• “Output file”—this tab shows all the calculated constants that are required by the PMSM sensor/sensorless FOC application.
It is also possible to generate the
m1_pmsm_appconfig.h
file, which is then used to preset all application parameters
permanently at the project rebuild.
• "Online update" — this tab shows actual values of variables on target and new calculated values, which can be used for update
variables on the target.
Most tabs offer the possibility to immediately load the parameters specified in the MCAT into the target using the “Update target”
button and save (or restore) them from the hard drive file using the “Save data” and “Reload data” buttons.
The following sections provide simple instructions on how to identify the parameters of a connected PMSM motor and how to
appropriately tune the application.
Control structure
In the "Project Tree" you can choose between the scalar control and the FOC control using the appropriate FreeMASTER tabs.
The application can be controlled through the FreeMASTER variables watch which correspond to the control structure selected in
FreeMASTER project tree. This is useful for application tuning and debugging. Required control structure must be selected in the
NXP Semiconductors
Remote control using FreeMASTER
MCUXpresso SDK Field-Oriented Control (FOC) of 3-Phase PMSM and BLDC motors, Rev. 0, 01/2022
User Guide
23 / 50







































































