






















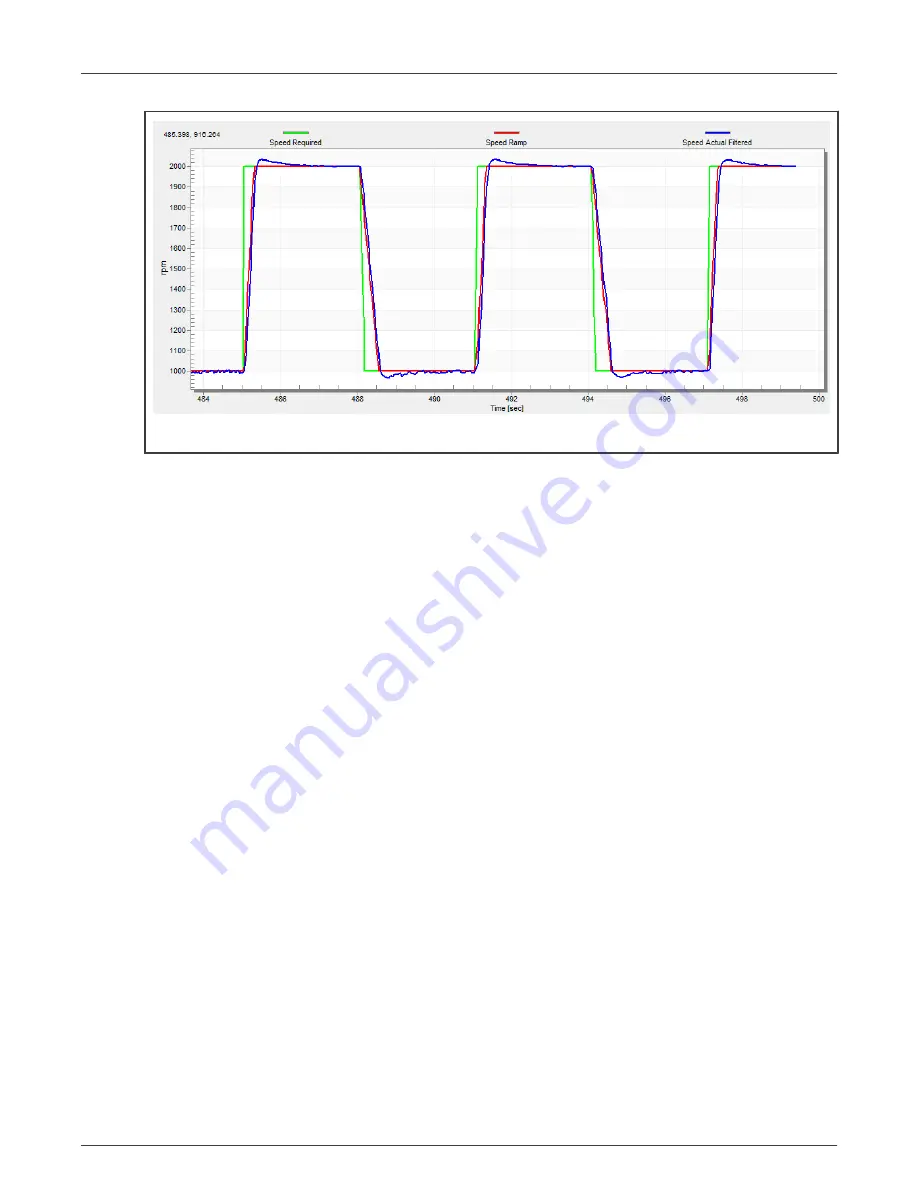
Figure 33. Speed controller response—speed loop response with a small overshoot
8.16 Position P controller tuning
The position control loop can be tuned using the proportional gain “M1 Position Loop Kp Gain” variable. It is a proportional
controller that can be used to unpretend the position-control systems. The key for the the optimal position response is a proper
value of the controller, which simply multiplies the error by the proportional gain (Kp) to get the controller output. The predefined
base value can be manually changed. An encoder sensor must be used for a working position control. The following steps provide
an example of how to set the position P controller for a PM synchronous motor:
1. Select the “Position Controller” scope in "Position Control" tab in the FreeMASTER project tree.
2. Tune the proportional gain in the position P controller constant:
• Set a small value of “PL_Kp” (M1 Position Loop Kp Gain).
• Select the position control, and set the required position in "M1 Position Required" variable (for example; 10
revolutions).
• Select the “Position Controller” scope and watch the actual position response.
3. Repeat the previous steps until you achieve the required position response.
The “PL_Kp” value is low and the actual position response on the required position is very slow.
NXP Semiconductors
Remote control using FreeMASTER
MCUXpresso SDK Field-Oriented Control (FOC) of 3-Phase PMSM and BLDC motors, Rev. 0, 01/2022
User Guide
42 / 50