





























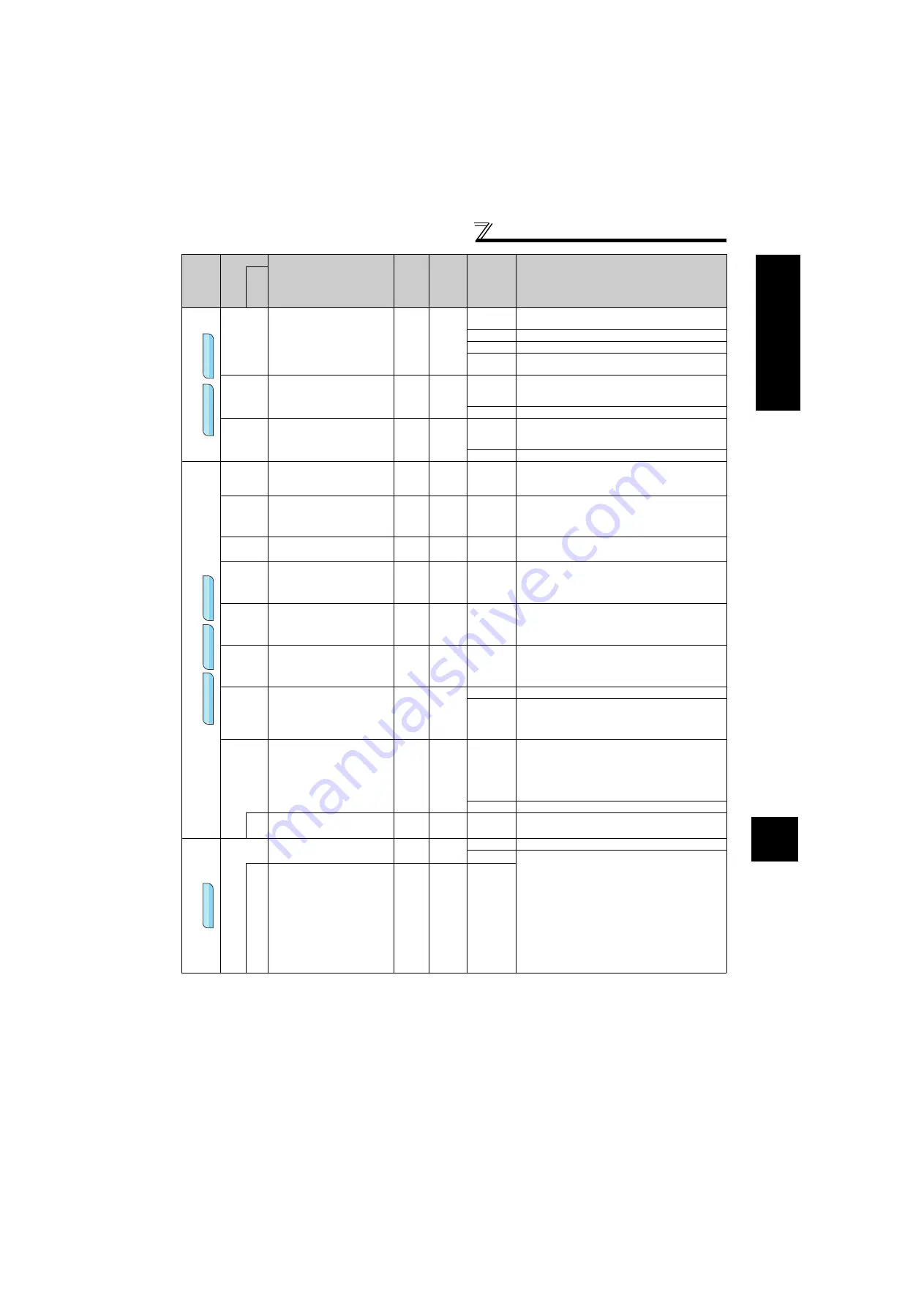
127
S
top-on cont
act
cont
rol
270
Stop-on contact/load torque
high-speed frequency
control selection
1
0
0
Without stop-on contact control and load torque high-
speed frequency control
1
Stop-on contact control
2
Load torque high speed frequency control
3
Stop-on c load torque high speed frequency
control
275
Stop-on contact excitation
current low-speed
multiplying factor
0.1%
9999
0 to 1000%
Usually set a value between 130% and 180%.
Set the force (holding torque) for stop-on-contact
control.
9999
No compensation.
276
PWM carrier frequency at
stop-on contact
1
9999
0 to 9
Set a PWM carrier frequency for stop-on-contact
control.
(Valid at the output frequency of 3Hz or less.)
9999
As set in
Pr. 72
PWM frequency selection
.
B
rake sequenc
e
funct
ion
278
Brake opening frequency
0.01Hz
3Hz
0 to 30Hz
Set to the rated slip frequency of the motor + about
1.0Hz.
This parameter may be only set if
Pr. 278
≤
Pr. 282
.
279
Brake opening current
0.1%
130%
0 to 220%
Generally, set this parameter to about 50 to 90%. If
the setting is too low, the load is liable to drop due to
gravity at start.
Suppose that the rated inverter current is 100%.
280
Brake opening current
detection time
0.1s
0.3s
0 to 2s
Generally, set this parameter to about 0.1 to 0.3s.
281
Brake operation time at
start
0.1s
0.3s
0 to 5s
Pr. 292
= 7: Set the mechanical delay time until the
brake is loosened.
Pr. 292
= 8: Set the mechanical delay time until the
brake is lo about 0.1 to 0.2s.
282
Brake operation frequency
0.01Hz
6Hz
0 to 30Hz
At this frequency, the brake opening request signal
(BOF) is switched off. Generally, set this parameter
to the
Pr. 278
s 3 to 4Hz.
Setting is enabled only when
Pr. 282
≥
Pr. 278
.
283
Brake operation time at
stop
0.1s
0.3s
0 to 5s
Pr. 292
= 7: Set the mechanical delay time until the
brake is 0.1s.
Pr. 292
= 8: Set the mechanical delay time until the
brake is about 0.2 to 0.3s.
284
Deceleration detection
function selection
1
0
0
Deceleration is not detected.
1
If deceleration is not normal during deceleration
operation, the inverter fault (E.MB2) is provided to
trip the inverter and turn OFF the brake opening
request signal (BOF).
285
Overspeed detection
frequency
0.01Hz
9999
0 to 30Hz
When brake sequence function is valid under
encoder feedback control
If (detected frequency) - (output frequency) >
Pr. 285
under encoder feedback control, the inverter fault
(E.MB1) is provided to trip the inverter and turn OFF
the brake opening request signal (BOF).
9999
Overspeed is not detected.
292
Automatic acceleration/
deceleration
1
0
0, 3, 5 to 8,
11
Brake sequence function is valid when a setting is "7
or 8".
S
peed dev
ia
tion e
xces
s det
e
ct
ion
285
Excessive speed deviation
detection frequency
0.01Hz
9999
9999
Without speed deviation excessive
0 to 30Hz
If the difference (absolute value) between the speed
command value and actual speed exceeds the
Pr.
285 Speed deviation excess detection frequency
setting
for longer than the time set in
Pr. 853 Speed deviation
time
during speed control under vector control, speed
deviation excessive occurs and error "E. OSD"
appears, resulting in a stop.
853
Speed deviation time
0.1s
1s
0 to 100s
Func
tio
n
Parameter
Name
Incre
ments
Initial
Value
Range
Description
Re
la
te
d
p
ara
m
e
te
rs
Magnetic fluxM
a
g
n
e
ti
c
f
lu
x
Magnetic flux
SensorlessS
e
n
s
o
rl
e
s
s
Sensorless
Magnetic fluxM
a
g
n
e
ti
c
f
lu
x
Magnetic flux
SensorlessS
e
n
s
o
rl
e
s
s
Sensorless
VectorV
e
c
to
r
Vector
VectorV
e
c
to
r
Vector







































































