





























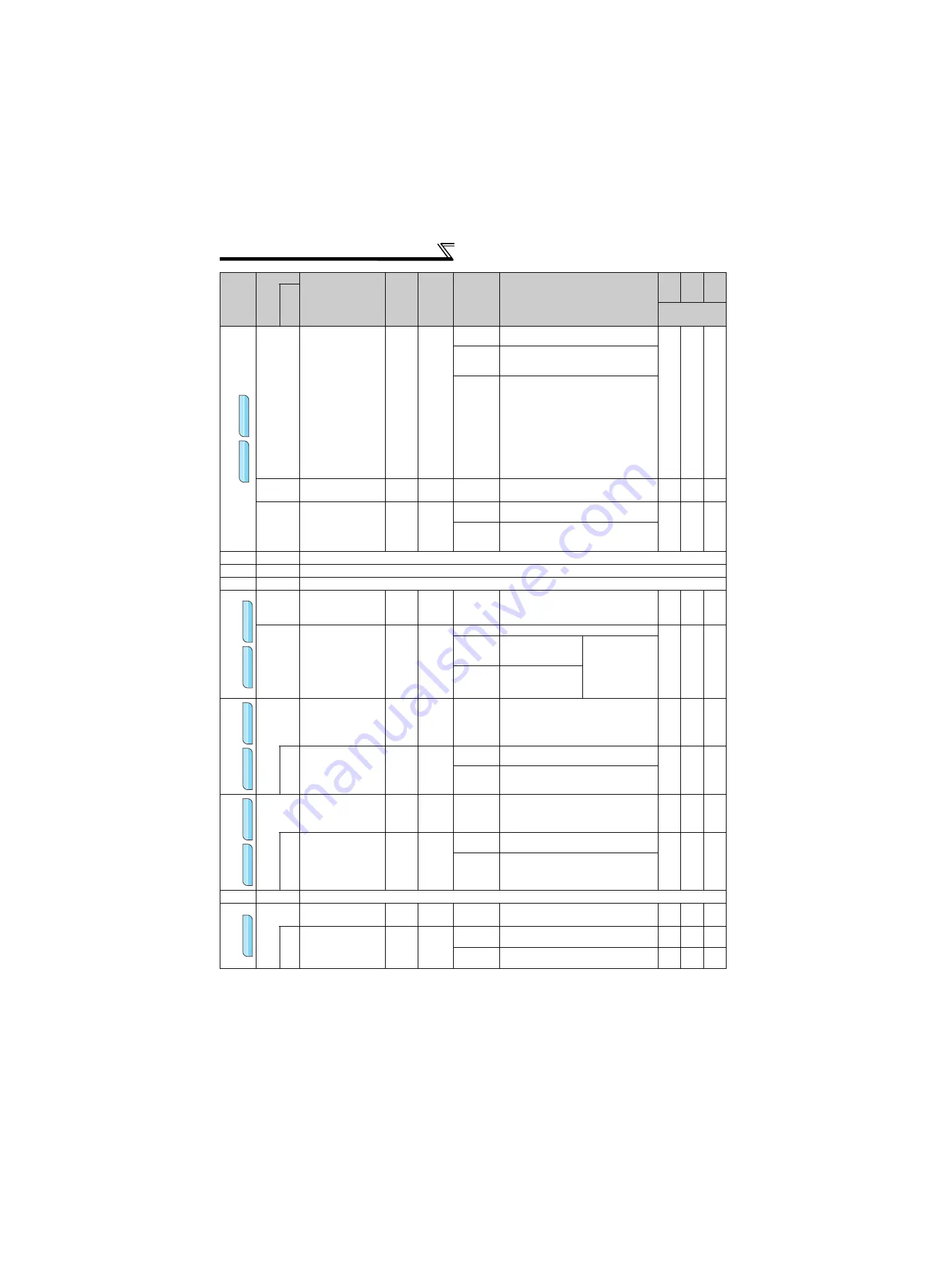
132
S
peed limit
807
Speed limit
selection
1
0
0
Use the speed command value during
speed control as speed limit.
{
{
{
1
According to
Pr. 808
and
Pr. 809
, set the
speed limit in forward and reverse rotation
directions individually.
2
The analog voltage of the terminal 1 input
is used to make speed limit. For 0 to 10V
input, set the forward rotation speed limit.
(The reverse rotation speed limit is
Pr. 1
Maximum frequency
)
For -10 to 0V input, set the reverse rotation
speed limit. (The forward rotation speed
limit is
Pr. 1
Maximum frequency
.) The
maximum frequency of both the forward
and reverse rotations is
Pr. 1
Maximum
frequency
.
808
Forward rotation
speed limit
0.01Hz
60Hz
0 to 120Hz
Set the speed limit level during forward
rotation. (valid when
Pr. 807
= 1)
{
{
{
809
Reverse rotation
speed limit
0.01Hz
9999
0 to 120Hz
Set the speed limit level during reverse
rotation. (valid when
Pr. 807
= 1)
{
{
{
9999
The setting is the same as that of the
torque limit in the forward rotation
direction.
—
810
Refer to
Pr. 22
.
—
811
Refer to
Pr. 22
and
Pr. 37
.
—
812 to 817
Refer to
Pr. 22
.
Easy gain
tu
ning selection
818
Easy gain tuning
response level
setting
1
2
1 to 15
1 : Slow response
↓
15 : Fast response
{
{
{
819
Easy gain tuning
selection
1
0
0
No tuning
{
×
{
1
With load estimation
(only under vector
control)
The optimum gain
is automatically set
from the torque
command and
speed during motor
operation.
2
Manual input of load
(
Pr. 880
)
S
peed loop pr
oportional
gain se
tting
820
Speed control P
gain 1
1%
60%
0 to 1000%
Set the proportional gain for speed control.
(Increasing the value improves trackability
in response to a speed command change
and reduces speed variation with
disturbance.)
{
{
{
830
Speed control P
gain 2
1%
9999
0 to 1000%
Second function of
Pr. 820
(valid when RT
signal is on)
{
{
{
9999
No function
S
p
eed control
integral time settin
g
821
Speed control
integral time 1
0.001s
0.333s 0 to 20s
Set the integral time during speed control.
(Decrease the value to shorten the time
taken for returning to the original speed if
speed variation with disturbance occurs.)
{
{
{
831
Speed control
integral time 2
0.001s
9999
0 to 20s
Second function of
Pr. 821
(valid when the
RT terminal is on)
{
{
{
9999
No function
—
822
Refer to
Pr. 74
.
S
peed detection
filter functio
n
823
Speed detection
filter 1
0.001s
0.001s 0 to 0.1s
Set the primary delay filter for the speed
feedback.
{
{
{
833
Speed detection
filter 2
0.001s
9999
0 to 0.1s
Second function of
Pr. 823
(valid when RT
signal is on)
{
{
{
9999
No function
{
{
{
Fu
nc
tio
n
Parameter
Name
Incre
ments
Initial
Value
Range
Description
Para
meter
copy
Param
eter
clear
All
param
eter
clear
Re
la
te
d
p
a
ra
mete
rs
{
: enabled
×
: disabled
SensorlessS
e
n
s
o
rl
e
s
s
Sensorless
VectorV
e
c
to
r
Vector
SensorlessS
e
n
s
o
rl
e
s
s
Sensorless
VectorV
e
c
to
r
Vector
SensorlessS
e
n
s
o
rl
e
s
s
Sensorless
VectorV
e
c
to
r
Vector
SensorlessS
e
n
s
o
rl
e
s
s
Sensorless
VectorV
e
c
to
r
Vector
VectorV
e
c
to
r
Vector
Содержание FR-A741-11K
Страница 7: ...MEMO ...
Страница 216: ...209 MEMO ...







































































