





























Logosol Multifunctional Servo Drive LS-231g2SB
Doc # 712231006 / Rev. B, 12/26/2017
Logosol, Inc.
•
•
•
•
2833 Junction Ave., Ste. 101
•
•
•
•
San Jose, CA 95134
•
•
•
•
Tel: (408) 744-0974
•
•
•
•
www.logosolinc.com
31
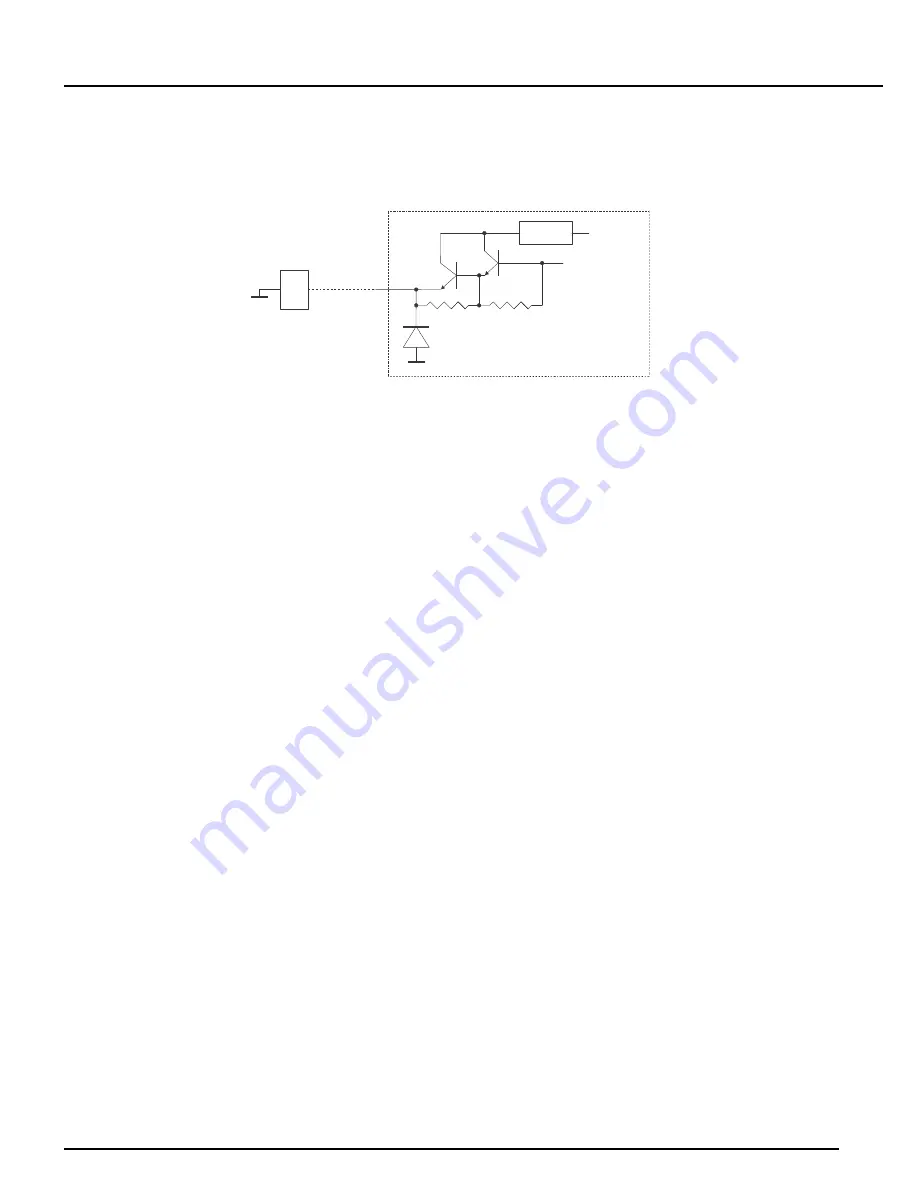
Brake/Output1
When OUTbit0=1 Brake/Output1 follows the state of OUTbit1.
When OUTbit0=0 Brake/Output1 follows the Servo drive state described in
LS-231g2SB Diagnostic and
I/O
. Brake current must not exceed 0.3A
Brake output
Amplifier interface and Step & Direction interface.
If Analog mode is selected, ADC (analog input) is differential and may be adjusted between ±2.5V to
±10.0V. The load is 10K.
“Analog offset” is a constant added to the amplifier’s input control voltage and can be used in applications
with asymmetric load. Refer to
Safety Features - LS-231g2SB diagnostic and I/O
section for Analog mode
description.
Step & Direction mode uses the same interface. In this mode Step, Dir (direction) and AEN (enable) inputs
are active. Refer to
Safety Features - LS-231g2SB diagnostic and I/O
section for Step & Direction mode
description.
Fault output and Encoder (+A, -A, +B, -B, +Z, -Z) outputs are TTL compatible.
All digital inputs are HC (high speed CMOS) compatible and with 4K7 pull-down resistors.
Serial Command Interface
Serial communication with the LS-231g2SB adheres to a full-duplex (4 wire) 8-bit asynchronous protocol
with one start bit, followed by 8 data bits (lsb first), followed by a single stop bit.
The communication protocol supports full-duplex multi drop RS-485 interface that allows multiple drives
to be controlled over a single RS-485 port. The host sends commands over it’s RS-485 transmit line and
receives all status data over shared RS-485 receive line.
The command protocol is a strict master/slave protocol in which the host sends a command packet to a
specific slave. The data are stored in the slave buffer until the end of the servo cycle (51.2µS) and then
the command is executed. Then the slave Drive sends back a status packet. Typically the host does not
send another command until a status packet has been received to insure that it does not overwrite any
previous command data still in use.
Each command packet consist of:
Header byte (0xAA)
Address byte – individual or group (0x00 – 0xFF)
Command byte
0 – 15 data bytes
Checksum byte
Short
Protection
+24V
OUTbit0=0 -> Brake=Servo drive state
OUTbit0=1 -> Brake=OUTbit1
Brake
CN1
Brake/Output1
Gnd
Gnd
Control Logic
LS-231g2SB







































































